





























PHD User Guide
22
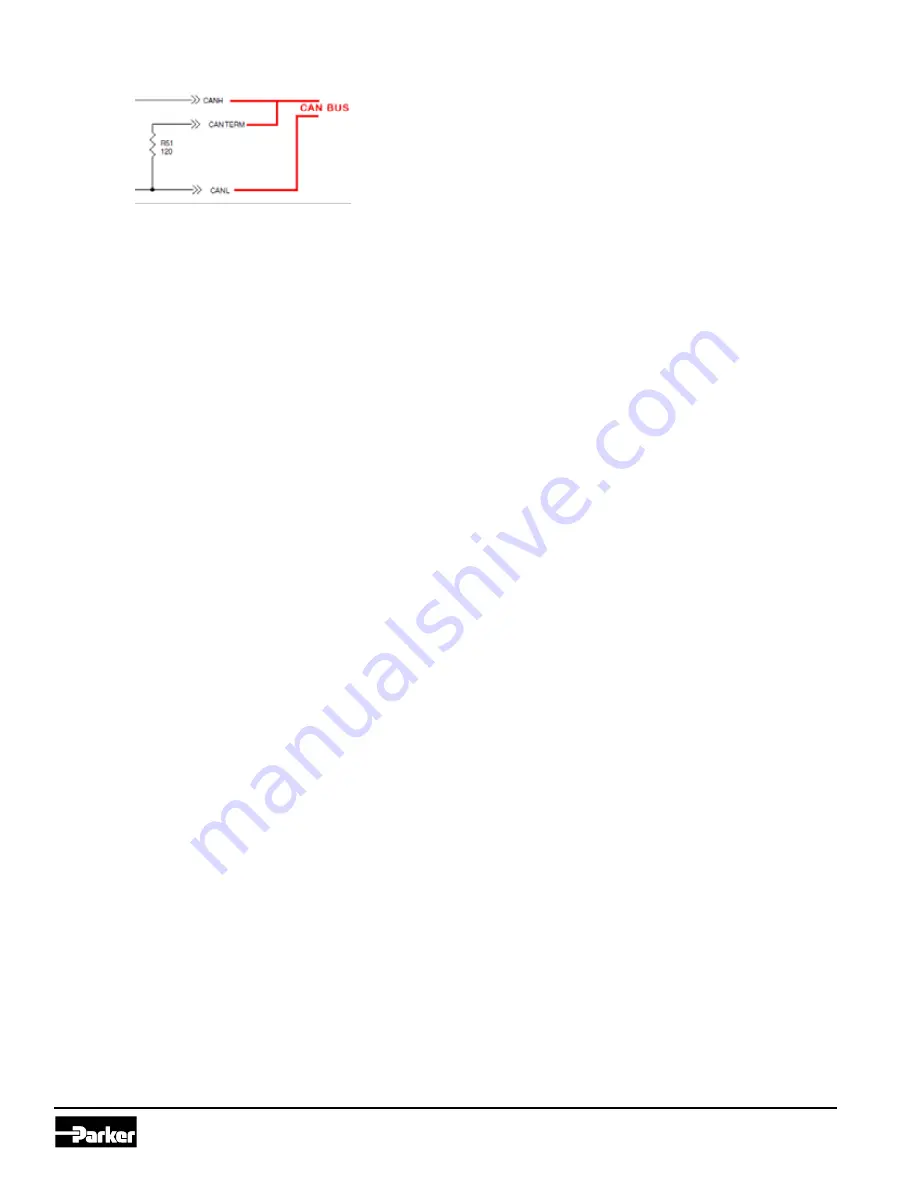
To implement the internal CAN1 internal termination resistor, the CAN_TERM pin should be wired as
shown.
Figure 6.1. PHD CAN_TERM wiring
Note:
Note this is not available on CAN2 of the PHD70.
The following lists the elements that are required for a J1939 CAN connection:
•
CAN Cable: A shielded twisted-pair cable should be used when connecting multiple modules to
the CAN bus. The cable for the J1939 CAN bus has three wires: CAN High, CAN Low, and CAN
Shield (which connect to the corresponding CAN_HIGH, CAN_LOW, and CAN_SHIELD pins on the
connector). When a module does not have a CAN_SHIELD pin, the CAN Shield should be connected
to an available ground terminal attached to the negative battery. The CAN cable must have an
impedance of 120 Ω.
•
The CAN cable is very susceptible to system noise; therefore, CAN shield must be connected as
follows:
a.
Connect CAN Shield to the point of least electrical noise on the CAN bus.
b. Connect CAN Shield as close to the center of the CAN bus as possible.
c.
Use the lowest impedance connection possible.
Note:
Ground loops can damage electronic modules. The CAN Shield can only be grounded to one point
on the network. If grounded to multiple points, a ground loop may occur.
•
CAN Connectors: Industry-approved CAN connectors are manufactured by ITT Cannon and
Deutsch, and come in either T or Y configurations.
•
CAN Harness: The CAN harness is the main backbone cable that is used to connect the CAN network.
This cable cannot be longer than 40 meters and must have a 120 Ω terminating resistor at each end.
The 120 Ω terminating resistors eliminate bus reflections and ensure proper idle-state voltage levels.
•
CAN Stubs: The CAN stubs cannot be longer than 1 meter, and each stub should vary in length to
eliminate bus reflections and ensure proper idle state voltage levels.
•
Max Number of Modules in a System: The CAN bus can handle a maximum of 30 modules in a
system at one time.