





























Safety Manual TECHMAN ROBOT Safety System 3.3 21
Light Ring will have the light blue light on to indicate the Safe Start up mode.
2. Press the Stop Button on the stick for about three seconds. The robot will perform the calibration
action of the start-up process and return to the previous operating mode.
When any fault other than discrepancy detected in the safety functions, the system performs a Cat. 0 stop.
When Cat. 0 stop occurs, reboot the robot system to recover from Cat.0 stop status.
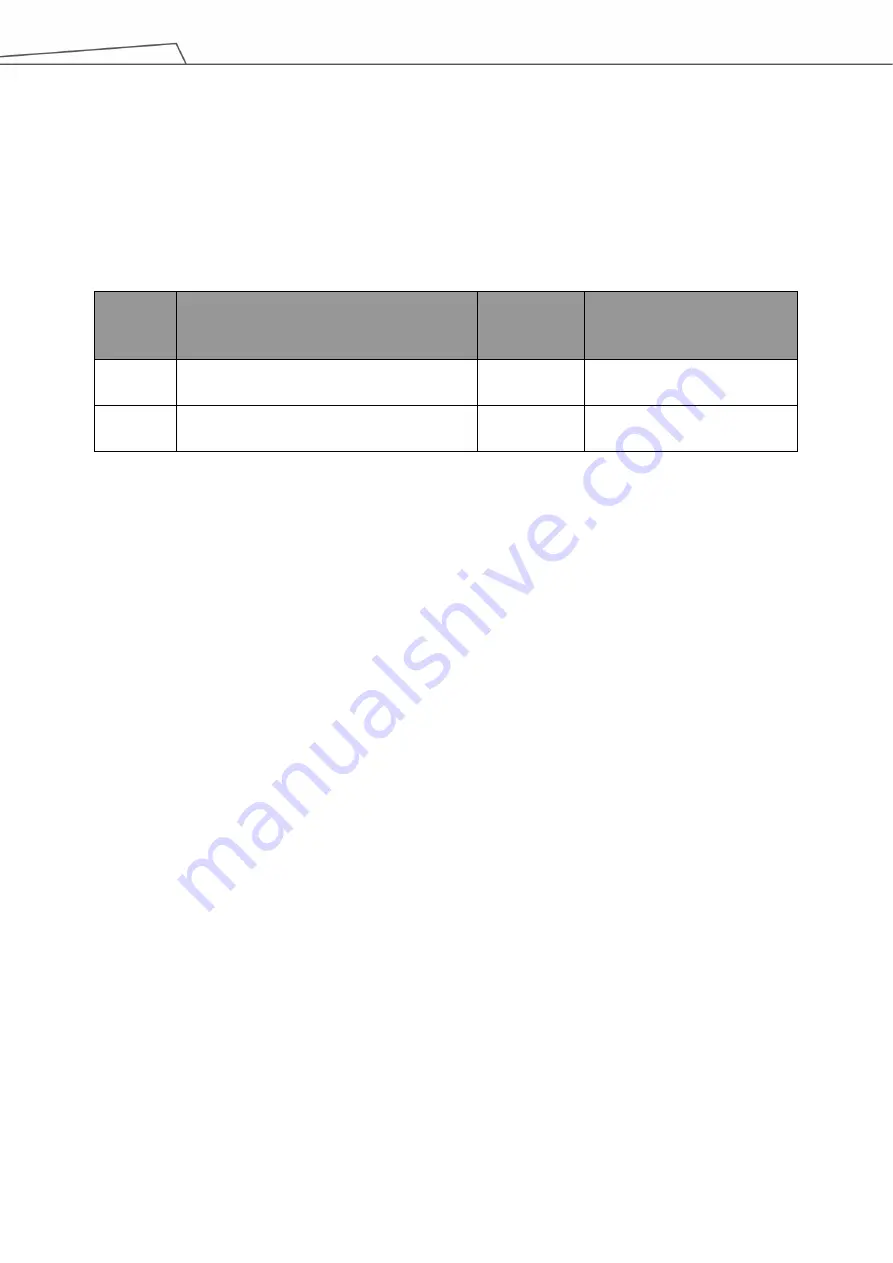
Safety
Function
Number
Name
Stop
Category
Reaction of
Fault Detection
SF3
User Connected External Safeguard Input
Cat. 2 stop
Discrepancy: Cat. 1 Stop
Others: Cat. 0 stop
SF9
User Connected External Safeguard Input
for Human-Machine Safety Settings
--
Discrepancy: Cat. 1 Stop
Others: Cat. 0 stop
Note: Stop categories in accordance with IEC 60204-1.
Table 5: Stop Category and Action of Fault Detection of SF3 and SF9
SF9 is a function to decrease the robot speed to which is set in Human-Machine Safety Settings and comes
with a deceleration time parameter that users can configure to prevent force/torque related safety functions
from triggering by the dramatic slowdown from high speed. The upper limit of the deceleration time is 800
milliseconds. Note that there is a fixed time delay of 1122 milliseconds after the trigger of Human-Machine
Safety Settings to start to monitor the TCP speed to let the robot decrease to speed from Human-Machine
Safety Settings. Users should take these timings into considerations for the risk assessment of applications
and set the distance of the safeguard properly.
2.3.4 SF4~SF8 Defined Safety Functions
The name and description of SF4 to SF8 safety functions are listed in the following table:





















































