





























7 Applied Functions
7 - 8
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
7-2
Positive and Negative Drive
Prohibition Functions
If the Positive Drive Prohibition Input (POT) or the Negative Drive Prohibition Input (NOT) is opened, the
motor will stop moving.
You can thus prevent the motor from moving outside of the movement range of the device by using limit
inputs from the device connected to the Servo Drive.
z
Input Signal Selection Function (Default Settings: 3401 hex, 3402 hex)
In the default settings, the allocations are as follows.
Note
Refer to 7-1 Sequence I/O Signals on page 7-2 for details on input signal selections 1 to 8.
z
Drive Prohibition Input Selection (3504 hex)
Set the operation of the Positive Drive Prohibition Input (POT) and the Negative Drive Prohibition
Input (NOT).
Install limit switches at both ends of the axis to prohibit the Linear Motor from driving in the direction
specified by the switch. This can be used to prevent the workpiece from driving too far and thus
prevent damage to the machine.
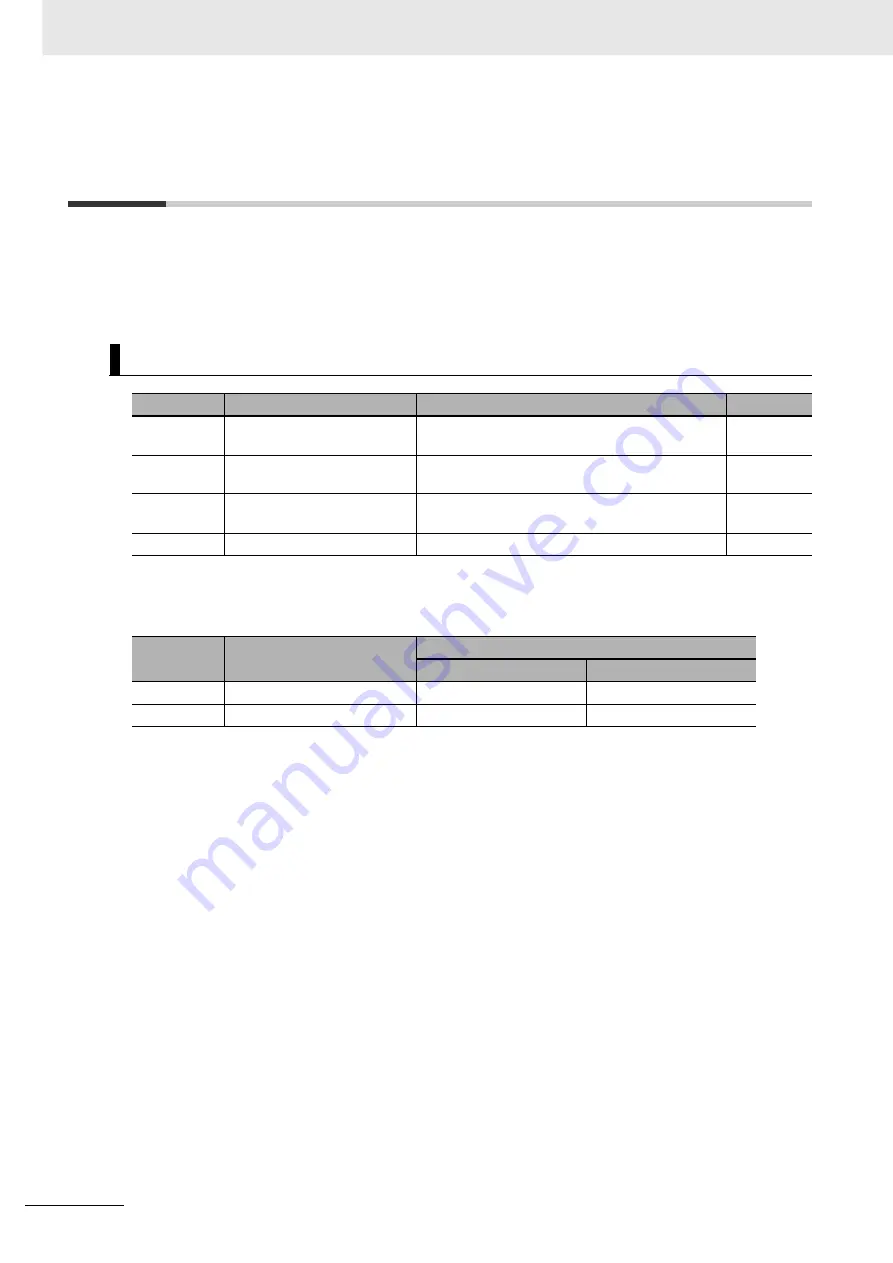
Objects Requiring Settings
Index
Name
Description
Reference
3400 hex to
3407 hex
Input Signal Selection 1 to 8
Set the input signal allocations and logic.
3504 hex
Drive Prohibition Input
Selection
Set the operation to be performed upon positive
and negative drive prohibition input.
3505 hex
Stop Selection for Drive
Prohibition Input
Set the deceleration and stop methods upon
positive and negative drive prohibition input.
3511 hex
Immediate Stop Force
Set the force limit for immediate stops.
Index
Name
Default setting
Set value
Position control
3401 hex
Input Signal Selection 2
0081 8181 hex
POT (NC)
3402 hex
Input Signal Selection 3
0082 8282 hex
NOT (NC)







































































