



























Machine Automation Controller
NX1
25
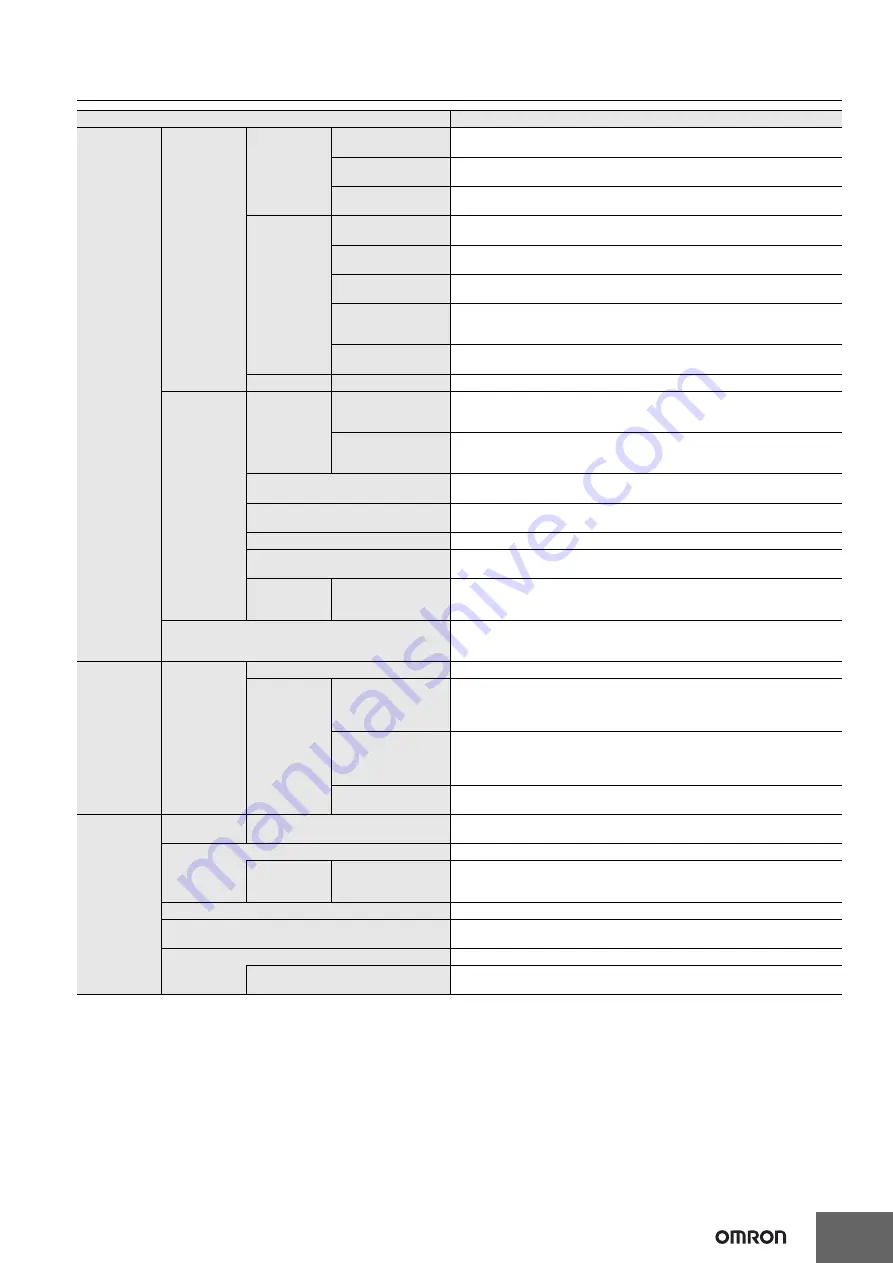
Communications
Built-in
EtherNet/IP
port
CIP
communications
service
Tag data links
Programless cyclic data exchange is performed with the devices on the EtherNet/IP
network
Message
communications
CIP commands are sent to or received from the devices on the EtherNet/IP network
CIP Safety routing
Routing function for CIP Safety on the EtherNet/IP network. The endpoint of CIP
Safety is NX-SL5
00 in the system
TCP/IP
applications
Socket services
Data is sent to and received from any node on Ethernet using the UDP or TCP pro-
tocol. Socket communications instructions are used
FTP client
Files are transferred via FTP from the CPU Unit to computers or controllers at other
Ethernet nodes. FTP client communications instructions are used
FTP server
Files can be read from or written to the SD Memory Card in the CPU Unit from com-
puters at other Ethernet nodes
Automatic clock
adjustment
Clock information is read from the NTP server at the specified time or at a specified
interval after the power supply to the CPU Unit is turned ON. The internal clock time
in the CPU Unit is updated with the read time
SNMP agent
Built-in EtherNet/IP port internal status information is provided to network manage-
ment software that uses an SNMP manager
OPC UA
Server function
The function to respond to requests from clients on the OPC UA network
EtherCAT port
Supported
services
Process data
communications
A communications method to exchange control information in cyclic communica-
tions between the EtherCAT master and slaves. This communications method is de-
fined by CoE
SDO communications
A communications method to exchange control information in noncyclic event com-
munications between EtherCAT master and slaves. This communications method
is defined by CoE
Network scanning
Information is read from connected slave devices and the slave configuration is au-
tomatically generated
DC (Distributed Clock)
Time is synchronized by sharing the EtherCAT system time among all EtherCAT de-
vices (including the master)
Enable/disable settings for slaves
The slaves can be enabled or disabled as communications targets
Disconnecting/connecting slaves
Temporarily disconnects a slave from the EtherCAT network for maintenance, such
as for replacement of the slave, and then connects the slave again
Supported
application
protocol
CoE
SDO messages of the CAN application can be sent to slaves via EtherCAT
Communications instructions
CIP communications instructions, socket communications instructions, SDO mes-
sage instructions, no-protocol communications instructions, FTP client instructions,
Modbus RTU protcol instructions, Modbus TCP protcol instructions
System
management
Event logs
Function
Events are recorded in the logs
Maximum
number of
events
System event log
768
[containing]
• For CPU Unit: 512
• For NX Unit without MPU: 256
Access event log
576
[containing]
• For CPU Unit: 512
• For NX Unit without MPU: 64
User-defined event
log
512
Debugging
Online editing
Single
Programs, function blocks, functions, and global variables can be changed online.
More than one operators can change POUs individually via network
Forced refreshing
The user can force specific variables to TRUE or FALSE
Maximum
number of
forced variables
Device variables for
EtherCAT slaves
64
MC Test Run
Motor operation and wiring can be checked from the Sysmac Studio
Synchronizing
The project file in the Sysmac Studio and the data in the CPU Unit can be made the
same when online
Differential monitoring
You can monitor when a variable changes to TRUE or changes to FALSE
Maximum number of monitored
variables
8
Item
NX102