





























DR
AFT
DR
AFT
DRAFT
DR
D
RAFT
DRAFT
DRA
FT DRAF
D
RAFT DRAFT DRAFT DRAFT DRAFT D
DRAFT
D
RAFT DRA
FT DRAFT DRAFT DRAFT DRA
UM10316_0
© NXP B.V. 2008. All rights reserved.
User manual
Rev. 00.06 — 17 December 2008
327 of 571
NXP Semiconductors
UM10316
Chapter 21: LPC29xx CAN 0/1
9.6 CAN controller bus timing register
The CAN controller bus timing register CCBT defines the timing characteristics of the
CAN bus. The register is only writable in soft-reset mode.
shows the bit assignment of the CCBT register.
2
EWIE
R/W
Error warning interrupt-enable
1
An interrupt is generated if either the error
status or bus status have changed
0*
1
TIE1
R/W
Transmit interrupt-enable 1
1
An interrupt is generated if the transmit buffer
status 1 is released (transition from logic 0 to
logic 1)
0*
0
RIE
R/W
Receive- interrupt enable
1
An interrupt is generated if the receive buffer is
not empty
0*
Table 272. CAN controller interrupt-enable register bit descriptioN (CCIE, address 0xE008
0010 (CAN0) and 0xE008 1010 (CAN1))
* = reset value
Bit
Symbol
Access
Value
Description
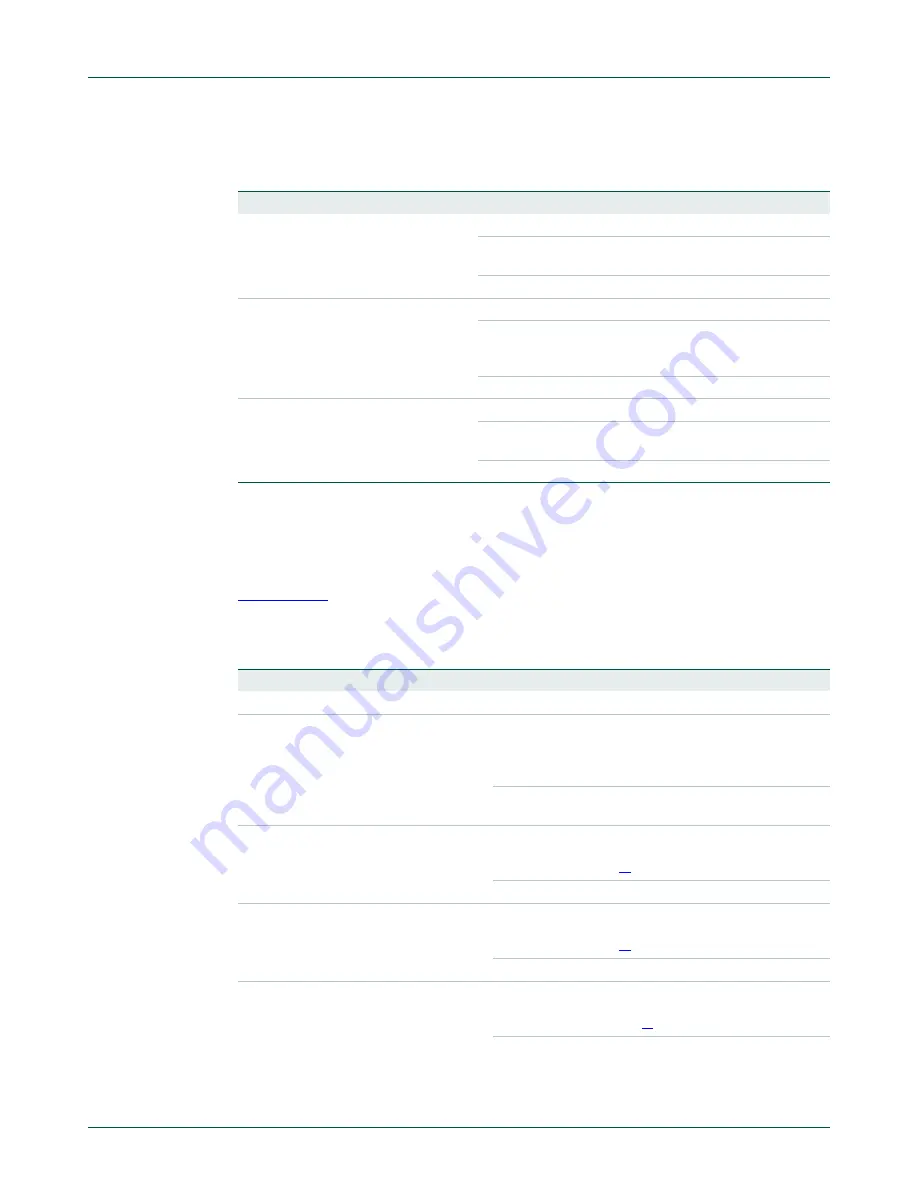
Table 273. CAN controller bust timing register bit description (CCBT, address 0xE008 0014
(CAN0) and 0xE008 1014 (CAN1))
* = reset value
Bit
Symbol
Access
Value
Description
31 to 24
reserved
R
-
Reserved; do not modify. Read as logic 0
23
SAM
R/W
1
The bus is sampled three times.
Recommended for low- or medium-speed
buses where filtering spikes on the bus line
are beneficial.
0*
The bus is sampled once. Recommended for
high-speed busses
22 to 20
TSEG2[2:0]
R/W
Timing segment 2. This is the time segment
after the sample point, determined by the
formula of
1h*
19 to 16
TSEG1[3:0]
R/W
timing segment 1; time segment before the
sample point which is determined by the
formula of
Ch*
15 and 14
SJW[1:0]
R/W
Synchronization jump width. The
synchronization jump length is determined by
the formula of
0h*







































































