



























System Description, Rev. 1
Freescale Semiconductor
2-1
Preliminary
Chapter 2
System Description
The system is designed to drive a 3-phase BLDC motor. The application meets the following performance
specifications:
•
Speed/Voltage control of BLDC motor using Hall sensors
•
Torque/Current control
•
Start from any motor position without rotor alignment
•
DCBus undervoltage fault protection
•
Real-time application monitoring via the PC master software application
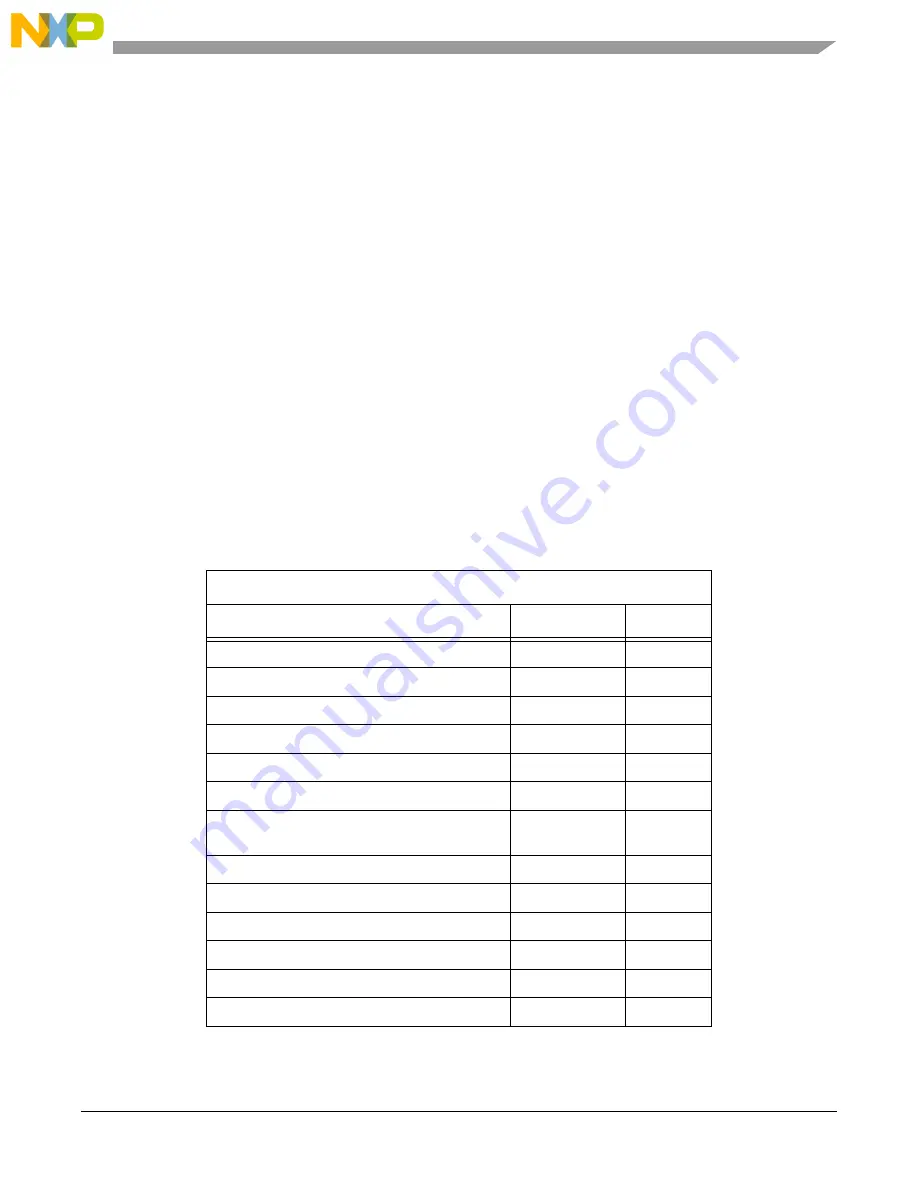
The BLDC drive introduced in this manual is designed to power a low-voltage BLDC motor equipped
with Hall sensors, which is supplied with the Motor Control Daughter Card. The motor has the following
specifications:
Table 2-1. Motor Information
M1
Characteristic
Typical Value
Units
Power Rating
6
W
Nominal Voltage
9.0
Volt
No-Load Speed
8600
rpm
Stall Torque
20
mNm
Speed / Torque Gradient
479.0
rpm / mNm
No-Load Current
110
mA
Terminal Resistance
Phase-to-Phase
4.50
Ohm
Maximum Permissable Speed
12000
rpm
Maximum Continuous Current at 5000rpm
1.03
A
Maximum Continuous Torque at 5000rpm
8.70
mNm
Maximum Efficiency
60.0
%
Torque Constant
9.5
mNm / A
Speed Constant
1007
rpm / v
Summary of Contents for 56F8000
Page 2: ......
Page 4: ...3 Phase BLDC Motor Control Rev 1 ii Freescale Semiconductor Preliminary...
Page 6: ...3 Phase BLDC Motor Control Rev 1 iv Freescale Semiconductor Preliminary...
Page 10: ...3 Phase BLDC Motor Control Rev 1 viii Freescale Semiconductor Preliminary...
Page 12: ...Introduction 3 Phase BLDC Motor Control Rev 1 1 2 Freescale Semiconductor Preliminary...
Page 20: ...System Description 3 Phase BLDC Motor Control Rev 1 2 8 Freescale Semiconductor Preliminary...
Page 26: ...Index Rev 1 Freescale Semiconductor Index 2 Preliminary...
Page 27: ......







































































