





























58
Northstar
Explorer AP380 System
Installation and Operation Manual
6-2 Setup > Profiles
Profiles are used to store a range of AP380
settings for different sea, environmental and
vessel conditions. Up to 5 user profiles may be
configured (see section 8-2).
Profile
Select the current profile to use.
Edit name
Use to edit the name of the currently selected
profile (see section 8-2).
Parameters
Opens the Parameters menu (see section 8-1).
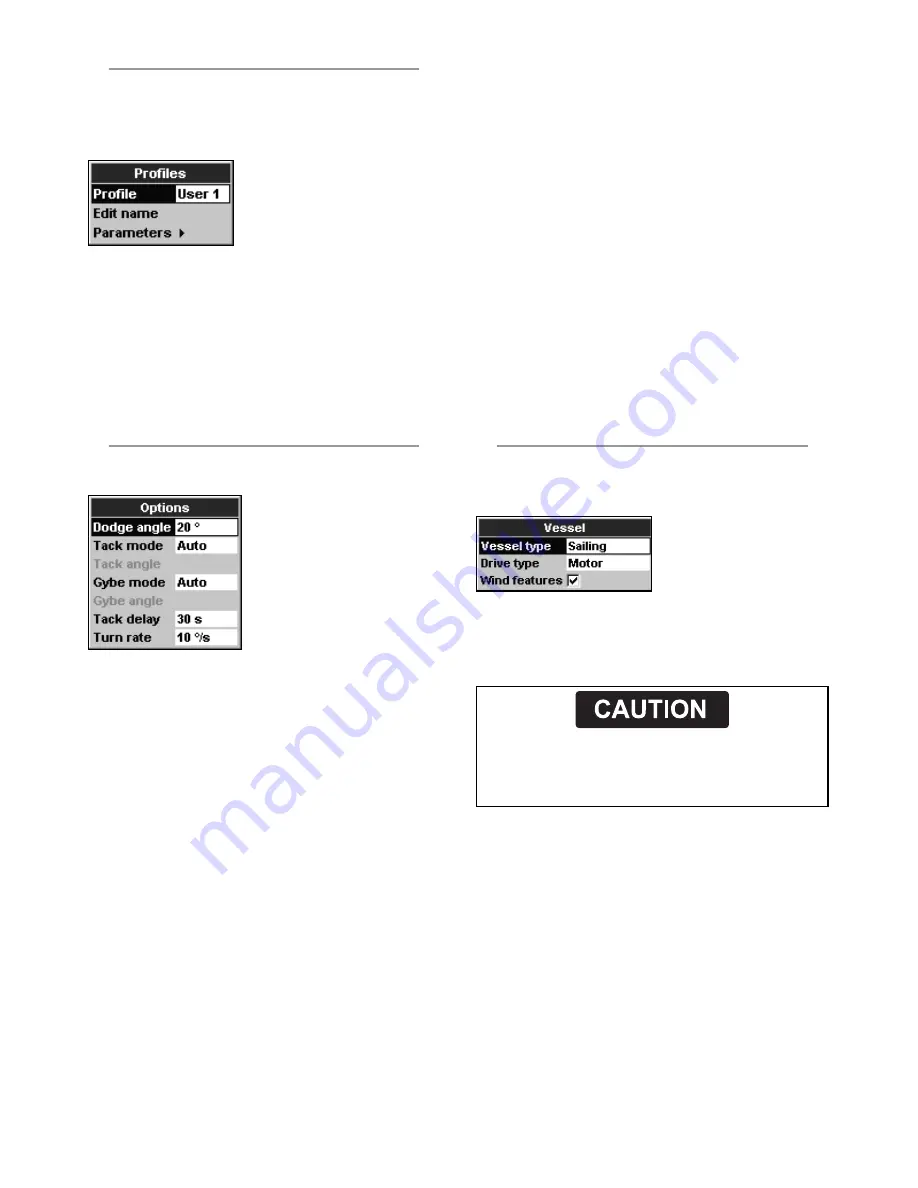
6-3 Setup > Options
Options can be selected to set AP380 operating
limits:
Dodge angle
Sets size of the dodge angle steps in degrees.
Minimum = 5˚; maximum = 30˚
Tack mode
Auto – vessel tacks to the same set wind
angle but on the opposing tack.
Set angle – vessel tacks through an angle
set in Tack angle, then steers to the same set
wind angle but on the opposing tack.
Tack angle
Set tack angle if Set angle is selected in Tack
mode.
Minimum = 50˚; maximum = 160˚
Gybe mode
Off – gybing is disabled.
Auto – vessel gybes to the same set wind
angle but on the opposing tack.
Set angle – vessel gybes through an angle set in
Gybe angle, then steers to the same set wind
angle but on the opposing tack.
Gybe angle
Set gybe angle if Set angle is selected in Gybe
mode
Minimum = 40˚; maximum = 140˚
Tack delay
Set delay that the AP380 will use from the
time a Tack is requested to the time a Tack is
carried out by the AP380
Minimum = 0; maximum = 120 (seconds)
Turn Rate
Set the maximum turn rate you want the
AutoPilot to use.
Minimum = 3; maximum = 20 (˚/second)
6-4 Setup > Vessel
Vessel type can be selected to alter the
performance characteristics of the AP380
depending on the vessel hull type:
Vessel type
Select Planing, Displacement or Sailing.
Changing the vessel type causes the steering
parameters to be reset to default values in the
current profile.
Drive type
Configures the AP380 to drive the type of
steering system. See installation section for
details.
Wind features
Controls whether wind features such as
Tack/Gybe are accessible.







































































