





























78
Commander S100 User Guide
P3.15
Motor Rated Frequency
Range:
0.0 to 300.0 Hz
Default:
Region Dependent (50 / 60 Hz)
Motor Rated Frequency must be set to the rated frequency of the motor (taken from the motor nameplate). The Motor Rated Frequency is used
with
Motor Rated Voltage
(P3.03) to define the motor control characteristics. See
Motor Control Mode
(P3.05).
P3.16
Number of Motor Poles
Range:
0 to 8
Default:
0 (Automatic)
If Number of Motor Poles = 0, the number of motor poles are calculated automatically as shown below:
Number of Motor Poles = 2 x 60 x
Motor Rated Frequency
(P3.15) /
Motor Rated Speed
(P3.02) rounded to the nearest integer.
The value can be entered manually but, if an odd number is entered, then the drive will use a value of motor poles one less than the number
entered.
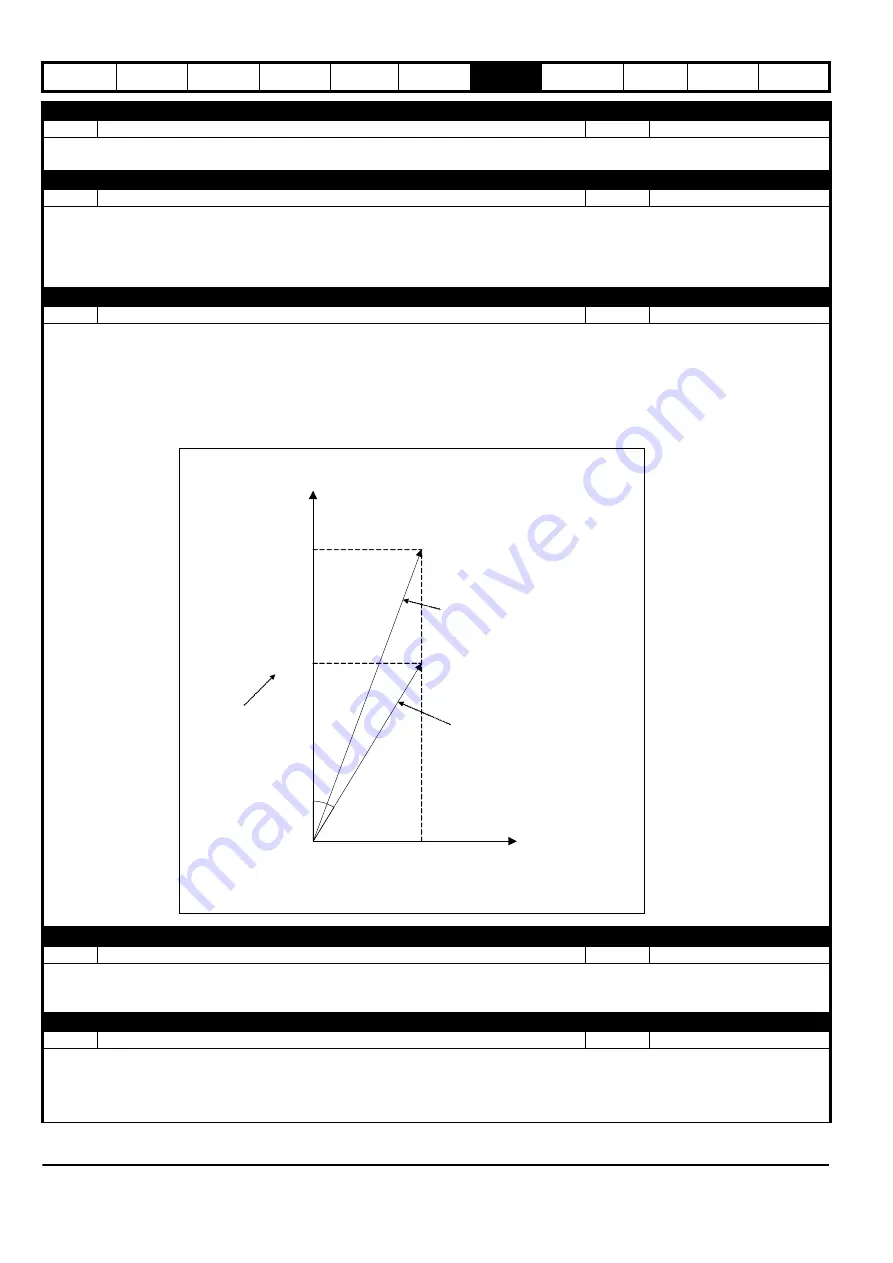
P3.17
Torque Current Limit
Range:
0.0 to Torque Current Maximum Limit
Default:
Rating Dependent
The drive can supply a maximum output current of 150 % of the drive rated current. 150 % of the drive rated current will not be equal to 150 % of
the motor rated torque current. The limit may be increased from the default setting depending on the setting
Motor Rated Power Factor
(P3.04) and
Motor Rated Current
(P3.01). This parameter can be used to set the limit of the output current as a percentage of the motor's torque producing
current.
This percentage torque can be limited if required.
Figure 7-10 Torque Current Limit
P3.18
Stator Resistance
Range:
0.00 to 199.99
Ω
Default:
2.00
Ω
The stator resistance of the motor. This is used when
Motor Control Mode
(P3.05) is set to resistance compensation, and
also when
Catch An Already Spinning Motor
(P3.11) is enabled. This value is populated when
Perform Auto-tune
(P3.09) has been performed
and can also be adjusted manually.
P3.19
Motor Stability Optimizer
Range:
0 to 1
Default:
0 (Disabled)
When enabled, the motor control algorithm is changed to help reduce stability problems. This is typically required when lightly loaded motors
exhibit stability issues below half rated speed, or when motors exhibit instability at maximum output voltage.
The disadvantages of setting this parameter are increased acoustic noise from the motor and a reduction in the thermal capability of the drive at
low output frequencies.
Magnesing Current (A)
Torque Current Limit P3.17 (%)
0
Rated
Magnesing
Current
Rated Torque
Producing Current
Rated Motor Current
P3.01
Drive Short -term Overload Limit
(150 % x Drive rated current)
F
P3.04 = cos
ɸ
Torque Current Limit
100 %
Maximum Limit
Summary of Contents for COMMANDER S100
Page 118: ...0478 0650 02...







































































