
















Getting Started with the NI 9502 and AKM Motors
2
ni.com
NI 9502 Overview
The NI 9502 is a brushless servo motor drive that provides outputs to drive a brushless servo motor,
inputs for Hall Effect sensors, and power connections. Depending on software settings, the NI 9502 can
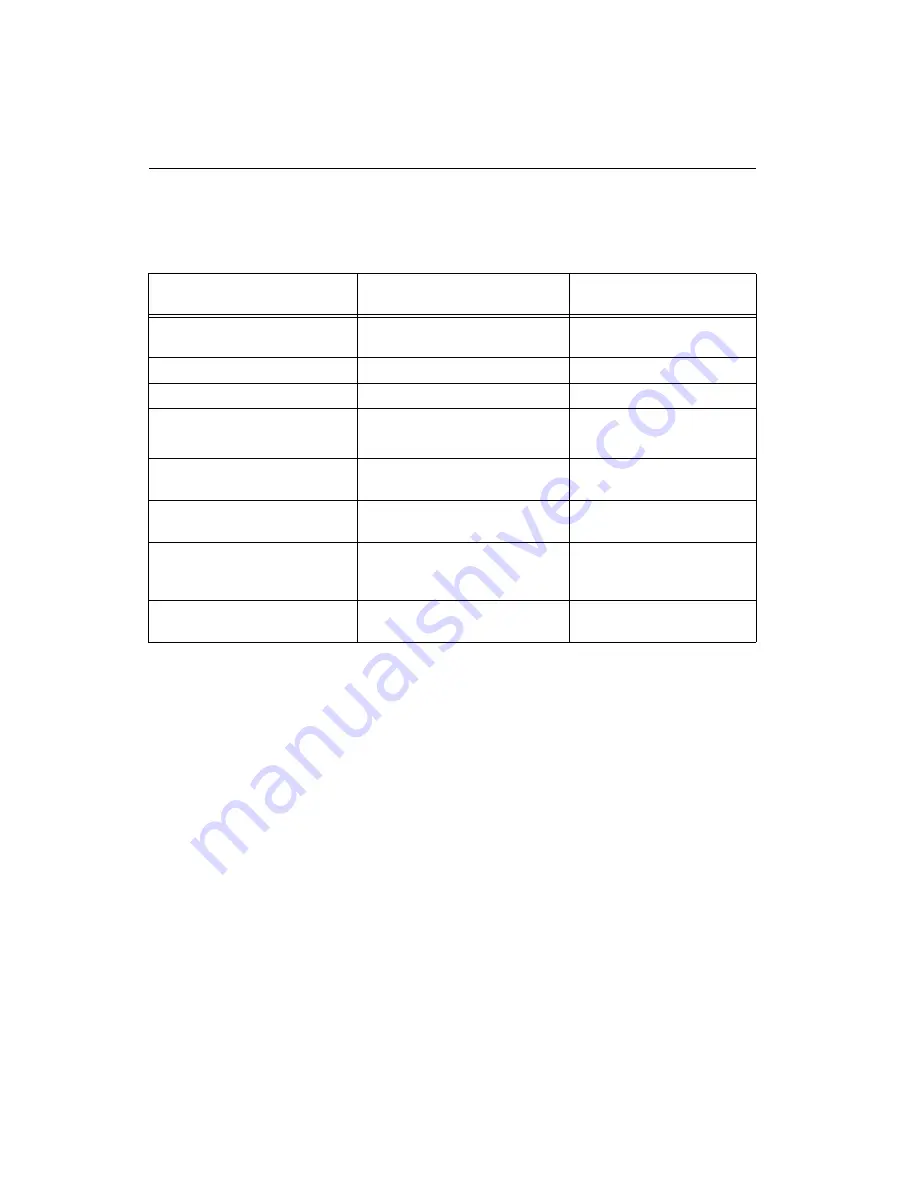
operate in either Trapezoidal or Field Oriented Control (FOC) commutation mode. Table 1 shows the
hardware and software differences between the NI 9502 commutation modes.
NI 9502 Commutation Mode
Specify the NI 9502 commutation mode in the
C Series Module Properties
dialog box, available by
right-clicking the NI 9502 C Series module in the
Project Explorer
window and selecting
Properties
from the shortcut menu. The I/O nodes available to the module change depending on which
commutation mode is selected.
Trapezoidal Commutation
Trapezoidal commutation involves sending current through two of the three motor phases at any time.
The phase transitions are controlled by the Hall Effect sensor state changes. With trapezoidal
commutation, one electrical revolution is divided into six steps of 60 degrees each.
The NI 9502 performs trapezoidal commutation based on the Hall Effect sensor inputs. For proper phase
switching to occur, the Hall Effect sensors from the motor must be connected to the correct Hall inputs
on the NI 9502 module. The Hall Effect sensor phase sequence is motor-dependent, so selecting the
correct inputs requires manual testing. Refer to the
Connecting and Using the NI 9502 in Trapezoidal
section for a detailed walkthrough using an example VI for assistance in
determining the proper Hall input connections to the NI 9502 module.
Figure 1 shows the NI 9502 module block diagram when it is used in Trapezoidal commutation mode
for velocity control.
Table 1.
NI 9502 Commutation Options
Trapezoidal Commutation
Field Oriented Control
Commutation
NI AKM Motor
Direct Connectivity
Yes
Yes
Torque Ripple
Up to 15%
Negligible
High-Speed Performance
Limited
Full motor capability
Feedback Required
Velocity control—No
Position control—Yes
Velocity control—Yes
Position control—Yes
Optimized Current Loop Gains
Provided for NI AKM Motors
No
Yes
NI SoftMotion Module
Requirement
None
NI SoftMotion Module
Premium
Hall Phasing
Manual configuration
Automatic configuration (using
NI SoftMotion Module
provided example)
Trajectory Generator
User-supplied setpoints or velocity
control
NI SoftMotion Module
trajectory generator







































































