





























© National Instruments
|
4-9
NI 7340 User Manual and Specifications
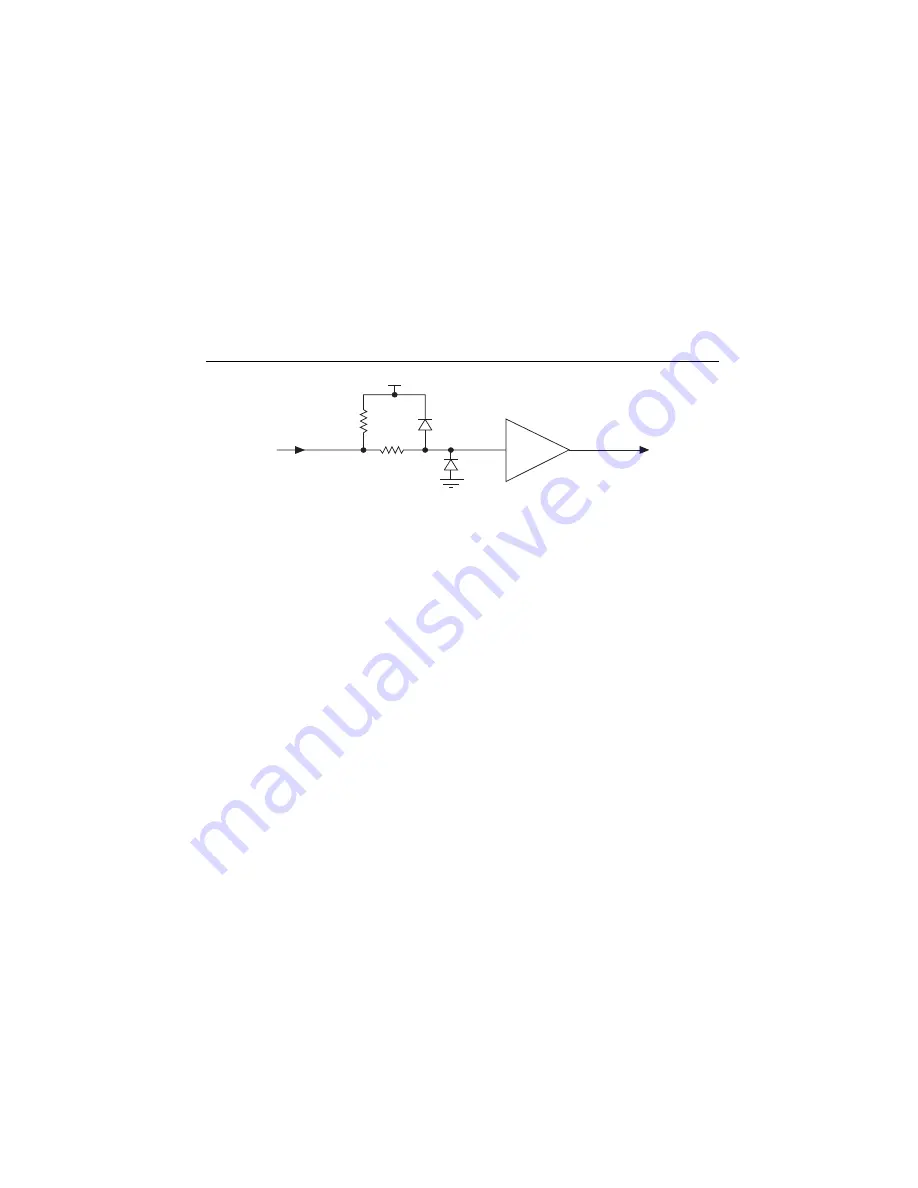
Encoder Input Circuit
Figure 4-5 shows a simplified schematic diagram of the circuit used for the Phase A, Phase B,
and Index encoder inputs. Both phases A and B are required for proper encoder counter
operation, and the signals must support the 90° phase difference within system tolerance. The
encoder and Index signals are conditioned by a software-programmable digital filter inside
the FPGA. The Index signal is optional but highly recommended and required for initialization
functionality with the Find Index function.
Figure 4-5.
Encoder Input Circuit
Trigger Inputs, Shutdown Input, and Breakpoint Outputs
The NI 7340 motion controller offers additional high-performance features in the encoder
FPGA. The encoder channels have high-speed position capture trigger inputs and breakpoint
outputs. These signals are useful for high-speed synchronization of motion with actuators,
sensors, and other parts of the complete motion system:
•
Trigger Input <1..4>—When enabled, an active transition on a high-speed position capture
input causes instantaneous position capture of the corresponding encoder count value. You
can use this high-speed position capture functionality for applications ranging from simple
position tagging of sensor data to complex camming systems with advance/retard
positioning and registration. An available NI 7340 motion controller position mode is to
move an axis Relative to Captured Position.
The polarity of the trigger input is programmable in software as active-low (inverting) or
active-high (non-inverting), rising or falling edge. You can also use a trigger input as a
latching general-purpose digital input by simply ignoring the captured position.
•
Shutdown Input—When enabled in software, the shutdown input signal can be used to kill
all motion by asserting the controller inhibits, setting the analog outputs to 0 V, and
stopping any stepper pulse generation. To activate shutdown, the signal must transition
from a low to a high state, or rising edge.
•
Breakpoint Output <1..4>—A breakpoint output can be programmed to transition when the
associated encoder value equals the breakpoint position. You can use a breakpoint output
to directly control actuators or as a trigger to synchronize data acquisition or other functions
in the motion control system.
You can program breakpoints as
absolute
,
modulo
, or
relative
positions. Breakpoint outputs
can be preset to a known state so that the transition when the breakpoint occurs can be low
to high, high to low, or toggle.
74FCT244
6
8
0
Ω
1/
8
W
From the extern
a
l
connector encoder
inp
u
t pin
s
To the
qua
dr
a
t
u
re
decoder circ
u
it
DGND
Vcc
3
.
3
k
Ω
Summary of Contents for PXI-7340
Page 1: ...PXI 7342...