


















Page-2
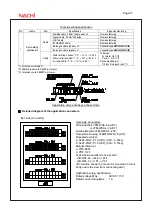
2. Basic specifications
Item Specifications
Robot model
SRA220H-01
SRA220HV-01
Construction Articulated
Number of axis
6
Drive system
AC servo motor
Axis 1
±3.14 rad
(
±180°
)
±
2.88 rad
(
±165°
)
Axis 2
-1.40
~
+1.05rad
(
-80
~
+60°
)
Axis 3
-2.69
~
+2.62rad(-154
~
+150°)
Axis 4
±3.66 rad
(
±210°
)
Axis 5
±2.27 rad
(
±130°
)
Max. working
envelope
Axis 6
±3.66 rad
(
±210°
)
Axis 1
2.01 rad/s
(
115°/s
)
Axis 2
1.83 rad/s
(
105°/s
)
Axis 3
1.97 rad/s
(
113°/s
)
Axis 4
2.27 rad/s
(
130°/s
)
Axis 5
2.27 rad/s
(
130°/s
)
Max. speed
Axis 6
3.58 rad/s
(
205°/s
)
Wrist 220
kg
Max. pay load
Forearm *1
20kg (45kg at maximum
)
Axis 4
1,337 N
・
m
Axis 5
1,337 N
・
m
Allowable
static load
torque
Axis 6
720 N
・
m
Axis 4
141.1 kg
・
m
2
Axis 5
141.1 kg
・
m
2
Allowable
moment of
inertia *2
Axis 6
79.0 kg
・
m
2
Position repeatability *3
±0.15 mm
Installation
Floor mount
Inverted mount
Ambient conditions
Temperature: 0 to 45 ºC *4
Humidity: 20 to 85%RH (No dew condensation allowed)
Vibration to the installation face: Not more than 0.5G (4.9 m/s
2
)
Dust-proof / Drip-proof performance
Wrist & Body ; IP54 equivalent
Noise *5
79.6 dB
Robot mass
1,100 kg
1[rad] = 180/π[°], 1[N
・
m] = 1/9.8[kgf
・
m]
- On controller display, axis 1 to 6 is displayed J1 to J6 for each.
- The specification and externals described in this specifications might change without a previous notice for the improvement.
- Explosion-proof is not available.
*1: This value changes by placement and load conditions of a wrist.
*2: The Allowable moment of inertia of a wrist changes with load conditions of a wrist.
*3: This value conforms to "JIS B 8432".
*4: Permitted height is not higher than 1,000m above sea level. If used in higher place, permitted temperature is affected by height.
*5: Robot noise is A-weighted equivalent sound level measured under “JIS Z 8737-1” (ISO 11201) with max. payload and max. speed.
Summary of Contents for SRA220H Series
Page 1: ...Standard specifications SRA220H 01 FD11 SRA220HV 01 FD11 7th edition 1707 SSRAEN 064 007 001 ...
Page 5: ...Page 3 3 Robot dimensions and working envelope SRA220H 01 ...
Page 6: ...Page 4 SRA220HV 01 ...
Page 11: ...Page 9 SRA220HV 01 Robot type ...
Page 20: ...Page 18 8 2 Spot welding specification 2 Connecting diagram Standard ...
Page 25: ......




































































