

























Page-12
■
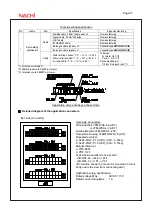
How to find the inertia moment of each axis
X
Z
Y
I
Z
m
x
z
y
I
Y
I
X
l
z
l
y
l
x
(
X
m
,
Y
m
,
Z
m
)
Too l
Point A coordinate system
Origin is Point A (intersection point of axis 6 , 4 r otation center and axis 5
rotation center ) and its X, Y and Z direction are d efined as
X:
Perpendicular coordinate with
Y, Z
Y: A
xis 5 rotation cen te r when wrist is in reference position
Z: A
xis 6 and 4 rotation cen te r when wr ist is in reference position
Tool COG coordinate system
Origin is CO G of tool, and parallel to point A coo rdina te system
x: Parallel to X
y: Parallel to Y
z: Parallel to Z
Ine rtia moment
I
X
: Around X on point A coordinate system
I
Y
: Around Y on point A coordinate system
I
Z
: Around Z on point A coordinate s ystem
I
x
: Around x
on tool C OG
coordinate system
I
y
: Around y
on tool C OG
coordinate system
I
z
: Around z
on tool C OG
coordinate system
m:
Tool mass
(
Xm, Ym, Zm
)
:
COG of tool on point A coordinate system
Point A
Coordinate system
Tool COG
Coordinate system
1
Calculate inertia moment defined
on tool COG coordinate system
(
xyz
).
If tool is regarded as prism, it is
calculated as right formula.
)
(
12
1
)
(
12
1
)
(
12
1
2
2
2
2
2
2
C
B
m
I
C
A
m
I
B
A
m
I
z
y
x
+
⋅
=
+
⋅
=
+
⋅
=
l
x
A
B
C
If tool is regarded as prism
l
y
l
z
m
Inertia moment example on tool COG coordinate system
Inertia moment
on tool COG coordinate system
These values (I
x
,
I
y
,
I
z
) are registered to controller.
This is different
from “allowable
moment of inertia”
written in robot
specification sheet.
2
Calculate inertia moment defined
on point A coordinate system
(
XYZ
), then calculate inertia
moment around robot wrist joint
(axis 4, 5 and 6).
This result must not be larger than
“Allowable moment of inertia”
written in robot specification sheet.
Inertia moment on point A coordinate system (
XYZ
) is
z
m
m
Z
y
m
m
Y
x
m
m
X
I
Y
X
m
I
I
Z
X
m
I
I
Z
Y
m
I
+
+
⋅
=
+
+
⋅
=
+
+
⋅
=
)
(
)
(
)
(
2
2
2
2
2
2
Axis 4 and 5 inertia moment is larger value of I
X
and I
Y
,
because this depends on axis 6 position.
Axis 6 inertia moment is
I
Z
itself.
Z
J
Y
X
J
J
I
I
I
I
I
I
=
=
=
6
5
4
)
,
(
max
Summary of Contents for SRA220H Series
Page 1: ...Standard specifications SRA220H 01 FD11 SRA220HV 01 FD11 7th edition 1707 SSRAEN 064 007 001 ...
Page 5: ...Page 3 3 Robot dimensions and working envelope SRA220H 01 ...
Page 6: ...Page 4 SRA220HV 01 ...
Page 11: ...Page 9 SRA220HV 01 Robot type ...
Page 20: ...Page 18 8 2 Spot welding specification 2 Connecting diagram Standard ...
Page 25: ......