





























Step
Action
3
Configure the auto commutation function
Mode 1
As described in Section "Auto commutation" on page 90
Recommendation:
P 390[0] = 1
P 392[0] = 500
P 392[1] = 500
P 392[2] = 500
P 392[3] = 500
P 393[0] = Rated motor current
P 393[1] = Rated motor current
Mode 2
Parameters 792.1 and 792.2 are used as the measuring frequency and
measuring amplitude (see step 2)
Recommendation:
P 794[0] = 100 ms
P 794[1] = 50 % of rated motor current
P 794[2] = 250 ms
4
Starting the expanded speed control circuit is not absolutely necessary,
but will result in control with better dynamic performance. The circuit can
be started by setting
P 350[0] - SEL_ObserverMethod
to a value of 4.
P 339 - CON_SCON_Kalman
can be used for tuning purposes.
5
If necessary, adjust the noise covariance matrices and the filter time
constants for the expanded speed control circuit (changes will take effect
in real-time).
Table 6.30: Configuring the Kalman filter for sensorless control (continue)
MOOG
ID
No.:
CB40859-001
Date:
02/2018
MSD Servo Drive - Device Help
95
6 Encoder
In order to make the encoderless control commissioning process easier, a function
used to calculate the position difference between encoderless control and a real
encoder can be activated. To use this function, the encoder channel that will be used
for the comparison must be selected in P 797[0] - ENC_CH4_Kalman_Compare.
Make sure that the encoder channel is configured correctly! This also includes the
encoder mounting angle P 349[0] - CON_FM_MConOffset. In addition to the
position difference, the encoder angle is also used to determine the d current and q
current as scope variables.
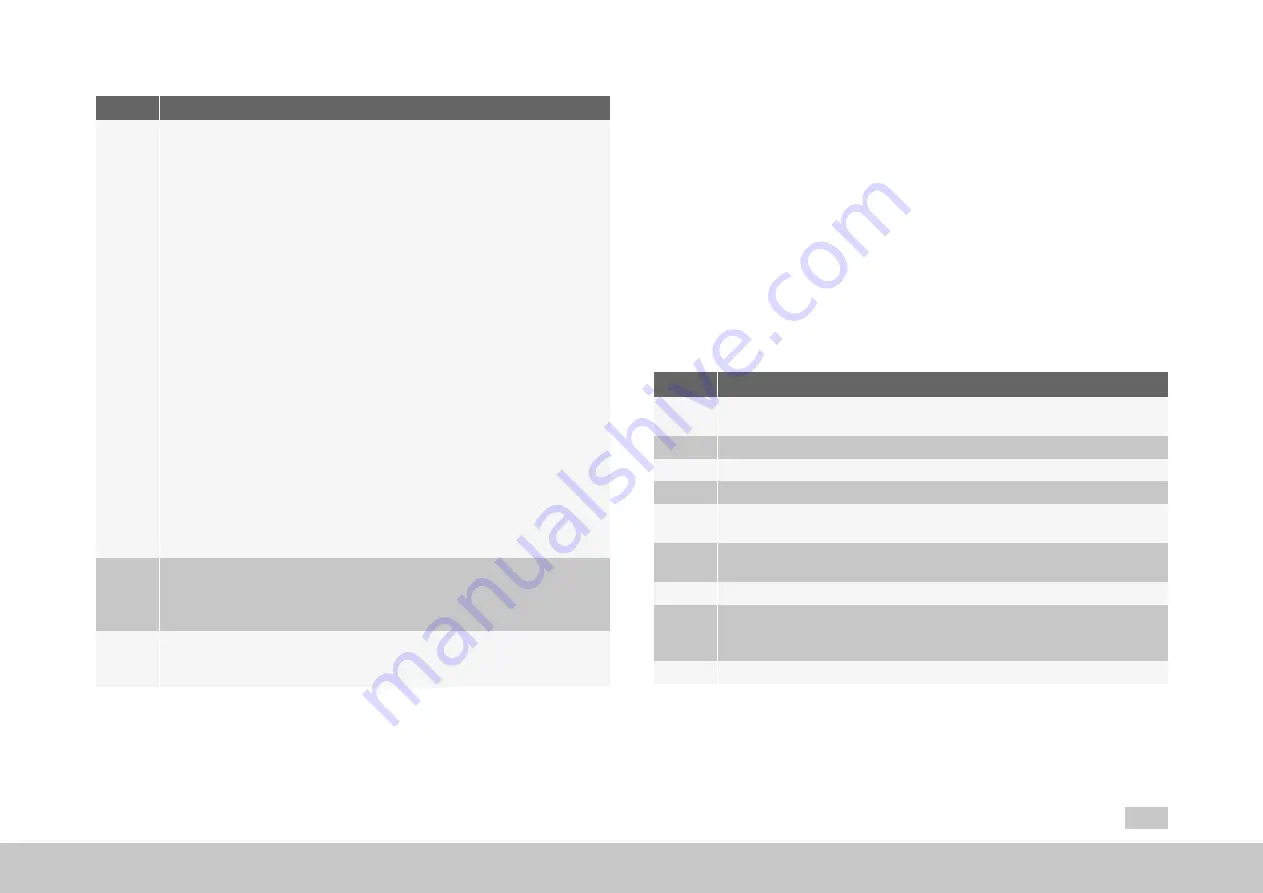
6.8.2 Sensorless asynchronous motor control
Step
Action
1
Set motor type (
P 450[0] - MOT_Type
) to “2 (ASM) = asynchronous
motor”
2
Enter the motor name (
P 451[0] - MOT_Name
)
3
Execute identification
4
Save the parameters that were determined
5
Set motor type (
P 450[0] - MOT_Type
) to “7 (ASM_SFC) = asynchronous
motor_SFC”
6
Set encoder for commutation and torque control (
P 520[0] - ENC_MCon
)
to “CH4(4) = virtual encoder (Channel 4)”
7
Set
P 508[0] - ENC_CH4_Sel
to "8 (SFC)"
The encoder for commutation will implicitly be SFC as a result of the new
motor type. If there is a real encoder, speed or position information can
be used for testing purposes.
8
Run the motor with speed control, using ramps.
Table 6.31: Configuring the asynchronous motor for sensorless control
From firmware 124.20-08 additional
document CC41778-001 applies







































































