





























263
PID control
4
4.20 PID control
4.20.1 Outline of PID control (Pr. 127 to Pr. 134, Pr. 241, Pr. 553, Pr. 554,
Pr. 575 to Pr. 577)
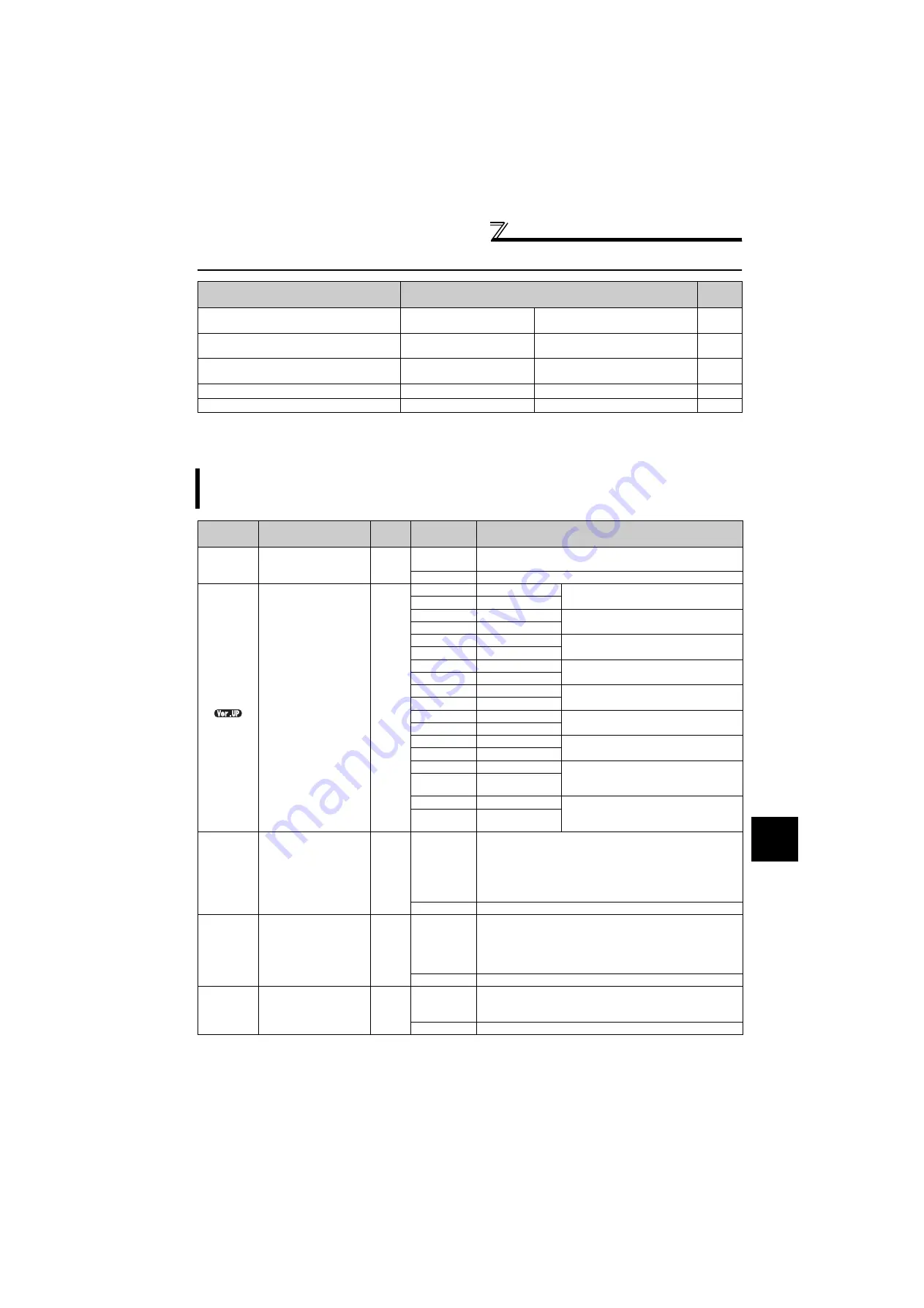
Purpose
Parameter that must be Set
Refer
to Page
Perform process control such as pump and
air volume.
Outline of PID control
Pr. 127 to Pr. 134, Pr. 553, Pr. 554,
Pr. 575 to Pr. 577
Calibrate the measured value input and PID
display coefficient
Bias and gain calibration for
PID displayed values
Pr. 241, Pr. 759,
C42 (Pr. 934) to C45 (Pr. 935)
Drive a motor at a constant speed before
starting to PID control
Pre-charge function
Pr. 760 to Pr. 769
Switch between two PID control settings
Second PID function
Pr. 753 to Pr. 758, Pr. 765 to Pr. 769
Pump function by multiple motors
Advanced PID function
Pr. 554, Pr. 575 to Pr. 591
The inverter can be used to exercise process control, e.g. flow rate, air volume or pressure.
The terminal 2 input signal or parameter setting is used as a set point and the terminal 4 input signal used as a
feedback value to constitute a feedback system for PID control.
Parameter
Number
Name
Initial
Value
Setting
Range
Description
127
PID control automatic
switchover frequency
9999
0 to 400Hz
Set the frequency at which the control is automatically
changed to PID control.
9999
Without PID automatic switchover function
128
PID action selection
10
10
, 110
PID reverse action
Deviation value signal input
(terminal 1
11
, 111
PID forward action
20
, 120
PID reverse action
Measured value (terminal 4
Set point (terminal 2
or
Pr. 133
)
21
, 121
PID forward action
40
, 140
PID reverse action
Measured value (terminal 4
Set point input (L
ON
W
ORKS
, CC-Link, BACnet)
41
, 141
PID forward action
50
PID reverse action
Deviation value signal input
(L
ON
W
ORKS
, CC-Link, BACnet)
51
PID forward action
60
PID reverse action
Measured value, set point input
(L
ON
W
ORKS
, CC-Link, BACnet)
61
PID forward action
PID reverse action
Deviation value signal input
(PLC function)
PID forward action
PID reverse action
Measured value, set point input
(PLC function)
PID forward action
PID reverse action
Deviation value signal input
(PLC function)
(Not applied to the inverter frequency)
PID forward action
100
PID reverse action
Measured value, set point input
(PLC function)
(Not applied to the inverter frequency)
101
PID forward action
129
*1
PID proportional band
100%
0.1 to 1000%
If the proportional band is narrow (parameter setting is small), the
manipulated variable varies greatly with a slight change of the
measured value. Hence, as the proportional band narrows, the
response sensitivity (gain) improves but the stability deteriorates,
e.g. hunting occurs.
Gain Kp = 1/proportional band
9999
No proportional control
130
PID integral time
1s
0.1 to 3600s
When deviation step is input, time (Ti) is the time required for
integral (I) action to provide the same manipulated variable as
proportional (P) action.
As the integral time decreases, the set point is reached earlier but
hunting occurs more easily.
9999
No integral control.
131
PID upper limit
9999
0 to 100%
Set the upper limit value. If the feedback value exceeds the
setting, the FUP signal is output. The maximum input (20mA/5V/
10V) of the measured value (terminal 4) is equivalent to 100%.
9999
No function
Summary of Contents for -NAFR-F720-00167-NA
Page 22: ...12 MEMO ...
Page 364: ...354 MEMO ...
Page 378: ...368 MEMO ...
Page 396: ...386 MEMO ...







































































