





























1 SERVO PARAMETER DETAILS
1.9 Positioning control setting servo parameters group ([Pr. PT_ _ ])
163
1
[Pr. PT26_Function selection T-2 (*TOP2)]
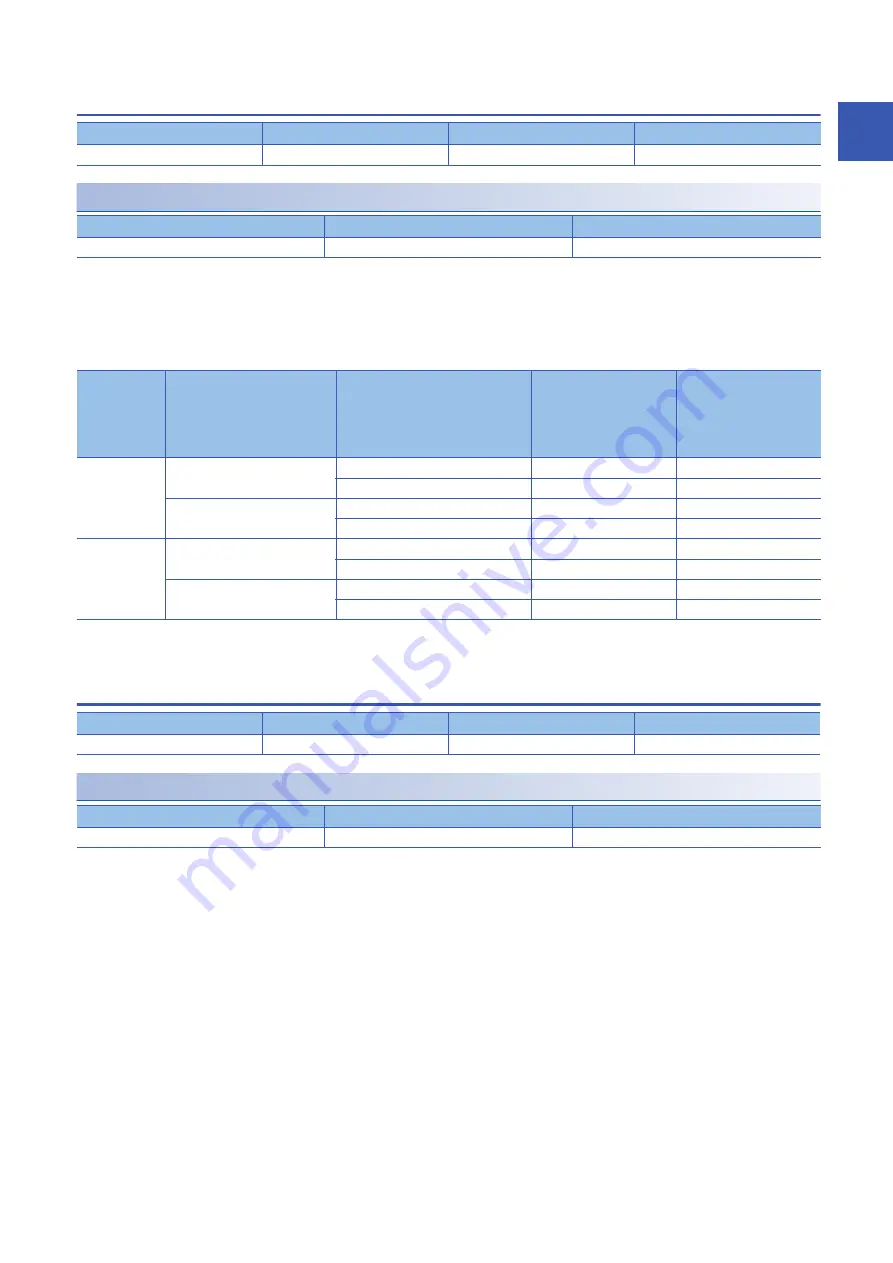
[Pr. PT26.4_Touch probe latch position selection]
Select the reflecting patterns of [Pr. PA14 Travel direction selection] and [Pr. PT08 Homing position data] to the latch position
in the touch probe function.
0: Reflect only some of the patterns of [Pr. PA14]
2: Reflect all the patterns of [Pr. PA14] and [Pr. PT08]
The reflecting patterns are as follows.
*1 The trigger corresponds to bit 2 or bit 10 of [Touch probe function (Obj. 60B8h)] or bit 2 of [Touch probe function 2 (Obj. 2DE8h)]. The
applicable object differs depending on the touch probe device being used.
[Pr. PT29_Function selection T-3 (*TOP3)]
[Pr. PT29.0_Device input polarity 1]
Select the proximity dog input polarity.
0: Dog detection with off
1: Dog detection with on
Initial value
Setting range
Setting method
Ver.
00000000h
Refer to the relevant detail No.
Each axis
Refer to the relevant detail No.
Initial value
Setting range
Ver.
0h
0h to 2h
C4
[Pr. PT26.4]
Trigger
[Touch probe function (Obj.
60B8h)]
[Touch probe function 2
(Obj. 2DE8h)]
[Pr. PT01.2 Unit for position
data]
Reflecting the setting
value of [Pr. PA14]
Reflecting the setting
value of [Pr. PT08]
0
0 (Triggered by inputting touch
probe)
0 (mm), 1 (inch), 3 (pulse)
2 (degree)
1 (Triggered at the zero point of
the encoder)
0, 1, 3
2
2
0 (Triggered by inputting touch
probe)
0, 1, 3
2
1 (Triggered at the zero point of
the encoder)
0, 1, 3
2
Initial value
Setting range
Setting method
Ver.
00000000h
Refer to the relevant detail No.
Each axis
Refer to the relevant detail No.
Initial value
Setting range
Ver.
0h
Refer to the text
A0







































































