





























11 OPTIONS AND PERIPHERAL EQUIPMENT
11.17 External dynamic brake
435
11
11.17
External dynamic brake
• In the torque mode, EM2 functions the same as EM1.
• Configure a sequence which switches off the magnetic contactor of the external dynamic brake after (or as
soon as) the servo-on command has been turned off at a power failure or a malfunction.
• For the braking time taken when the external dynamic brake is operated, refer to the following.
318 Dynamic brake characteristics
• The external dynamic brake is rated for a short duration. Do not use it very frequently.
• When using the 400 V class external dynamic brake, the power supply voltage is restricted to 1-phase 380
V AC to 463 V AC (50 Hz/60 Hz).
• The external dynamic brake operates when an alarm or [AL. E6 Servo forced stop warning] occurs, or the
power is turned off. Do not use the external dynamic brake to stop in a normal operation as it is the function
to stop in emergency.
• For a machine operating at the recommended load to motor inertia ratio or less, the estimated number of
usage times of the external dynamic brake is 1000 times while the machine decelerates from the rated
speed to a stop once in 10 minutes.
• Be sure to enable EM1 (Forced stop 1) after servo motor stops when using EM1 (Forced stop 1) frequently
in other than emergency.
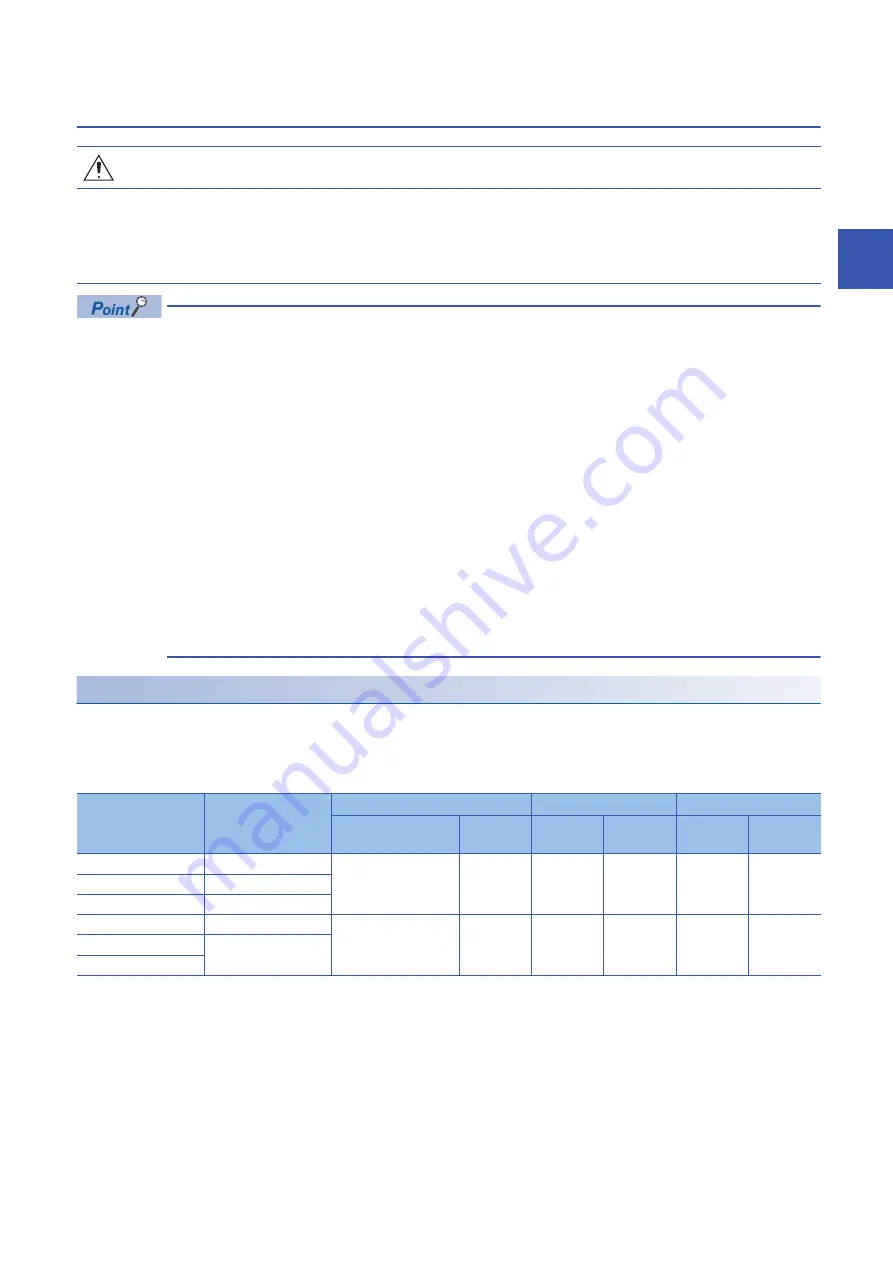
Selection of external dynamic brake
The dynamic brake is designed to bring the servo motor to a sudden stop when a power failure occurs or the protective circuit
is activated, and is built in the servo amplifier of 7 kW or less. Since it is not built in the servo amplifier of 11 kW or more,
purchase it separately. Assign DB (Dynamic brake interlock) to any of CN3-9, CN3-13, and CN3-15 pins in [Pr. PD07] to [Pr.
PD09].
CAUTION
• Use an external dynamic brake for a servo amplifier of MR-J4-11KGF(-RJ) to MR-J4-22KGF(-RJ) and MR-J4-11KGF4(-RJ) to MR-J4-22KGF4(-RJ). Failure
to do so will cause an accident because the servo motor does not stop immediately but coasts at an alarm occurrence for which the servo motor does not
decelerate to stop. Ensure the safety in the entire equipment. For alarms for which the servo motor does not decelerate to stop, refer to the following.
• The external dynamic brake cannot be used for compliance with SEMI-F47 standard. Do not assign DB (Dynamic brake interlock) in [Pr. PD07] to [Pr. PD09].
Failure to do so will cause the servo amplifier to become servo-off when an instantaneous power failure occurs.
Servo amplifier
External dynamic
brake
Molded-case circuit breaker
Fuse (Class T)
Fuse (Class K5)
Frame, rated
current
Voltage
AC [V]
Current
[A]
Voltage
AC [V]
Current
[A]
Voltage
AC [V]
MR-J4-11KGF(-RJ)
DBU-11K
30 A frame 5 A
240
1
300
1
250
MR-J4-15KGF(-RJ)
DBU-15K
MR-J4-22KGF(-RJ)
DBU-22K-R1
MR-J4-11KGF4(-RJ)
DBU-11K-4
30 A frame 5 A
480
1
600
1
600
MR-J4-15KGF4(-RJ)
DBU-22K-4
MR-J4-22KGF4(-RJ)
Summary of Contents for MELSERVO-J4 series
Page 2: ......
Page 605: ...APPX Appendix 6 EC declaration of conformity 603 A ...
Page 638: ...636 APPX Appendix 14 Encoder output pulse setting method MEMO ...
Page 645: ......







































































