





























650
37 FUNCTIONS
37.5 Program Execution in Both Systems
Precautions
The following lists the precautions for using a program executed in both systems.
Program execution time
Set a program execution time of the standby system to be shorter than that of the control system. When a program execution
time of the standby system is longer than the total program execution time of the control system, the control system starts the
next scan before the standby system has received tracking data, causing a continuation error. If the systems are switched in
this state, the latest data may not be reflected on the new control system.
When a program execution time of the standby system cannot be shortened, set SD1662 (Tracking transfer data receive
completion wait time) to extend a waiting time for tracking data receive completion of the control system. With this setting, the
control system CPU module starts the next scan after the standby system has received tracking data. Even if the systems are
switched, the control can be continued based on the latest data.
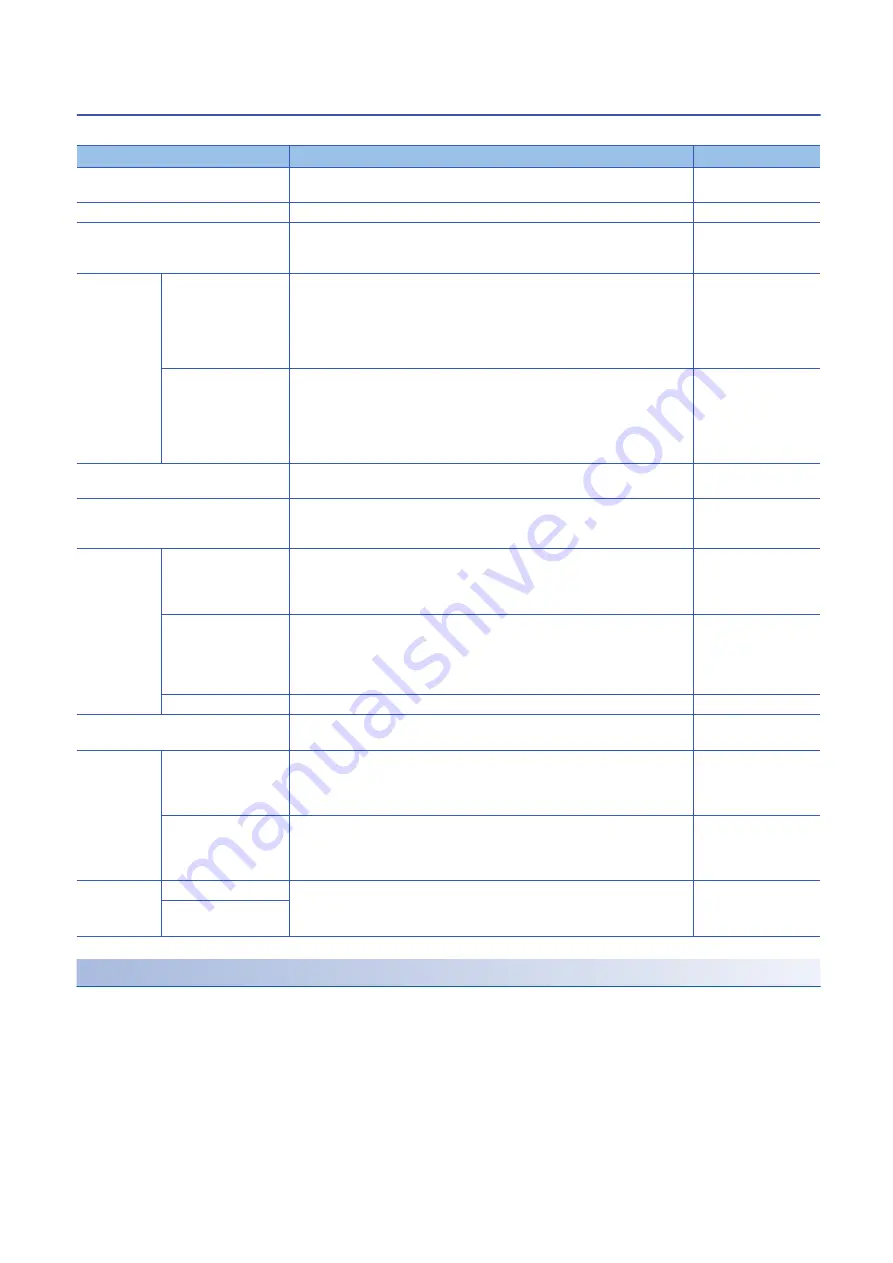
Item
Description
Reference
Program execution time
Set a program execution time of the standby system to be shorter than that of the
control system.
Page 650 Program
execution time
Constant scan
The constant scan function is invalid for the standby system.
Time required for system switching
If system switching is attempted to be performed while a program executed in both
systems is being executed, the system is switched after the END instruction is
completed. Thus, a time required for system switching may be extended.
Program
execution type
Execution type change
The execution type of a program executed in both systems is not taken over at
system switching.
Even if the systems are switched after the execution type is changed by using a
program control instruction (PSCAN(P), PSTOP(P), or POFF(P) instruction) on the
old control system, the program is executed on the new control system with the
execution type of the old standby system.
Initial execution type
When the systems are switched while an initial execution type program set as a both
systems execution program is being executed, the initial execution type program is
executed twice on the new control system CPU module.
The old standby system is switched to the new control system after the initial
execution type program has been completed, and then the initial execution type
program is executed again.
Interrupt disabled or enabled state
The control system and standby system have individual interrupt disabled or enabled
state because the states are not transferred.
Tracking transfer
Do not set global devices used in a program executed in both systems as a tracking
transfer target. When using labels in a program executed in both systems, use local
labels. When using FBs in a program executed in both systems, use local FBs.
Device
Timer (T)
When the control system is switched to the standby system, the current value of the
timer is not updated in the first scan of the new standby system and a timeout does
not occur. As a result, an error of the time required for system swi one scan is
produced at system switching.
Long timer (LT) and long
retentive timer (LST)
When the long timer (LT) or long retentive timer (LST) is used in the standby system,
time is not measured and a timeout does not occur.
After the standby system has been switched to the control system, the long timer (LT)
or long retentive timer (LST) is started up. To measure time in the standby system,
use the timer (T).
Interrupt pointer (I)
The interrupt pointer (I) cannot be used for the standby system.
Restricted instructions
Some instructions have restrictions when they are used in a program executed in
both systems.
Page 651 Restricted
instructions
Standard
function block
TIMER_
_M
When the control system is switched to the standby system, the current value of the
timer is not updated in the first scan of the new standby system and a timeout does
not occur. As a result, an error of the time required for system swi one scan is
produced at system switching.
TP(_E), TON(_E),
TOF(_E)
When these function blocks are used in the standby system, time is not measured
and a timeout does not occur.
After the standby system has been switched to the control system, TP(_E), TON(_E),
or TOF(_E) is started up.
Ethernet
Socket communications
When data is sent to the Ethernet-equipped module of the standby system, the data
receive processing is not performed because the Ethernet-equipped module discards
the received data.
MELSEC iQ-R
Ethernet User's Manual
(Application)
Communications using
the fixed buffer
Summary of Contents for MELSEC iQ-R-R00CPU
Page 2: ......
Page 151: ...9 MONITOR FUNCTION 9 1 Real Time Monitor Function 149 9 MEMO ...
Page 323: ...18 SEQUENCE SCAN SYNCHRONIZATION SAMPLING FUNCTION 321 18 MEMO ...
Page 330: ...328 20 ROUTING SETTING 20 3 Precautions MEMO ...
Page 423: ...26 BASIC CONCEPT 26 8 State Transition of the Redundant System 421 26 MEMO ...
Page 1014: ...1012 APPX Appendix 15 Added and Enhanced Functions MEMO ...
Page 1027: ......







































































