





























7. Usage
MiR Shelf Lift Operating guide (en) 12/2019 - v.1.0 ©Copyright 2019: Mobile Industrial Robots A/S.
53
4.
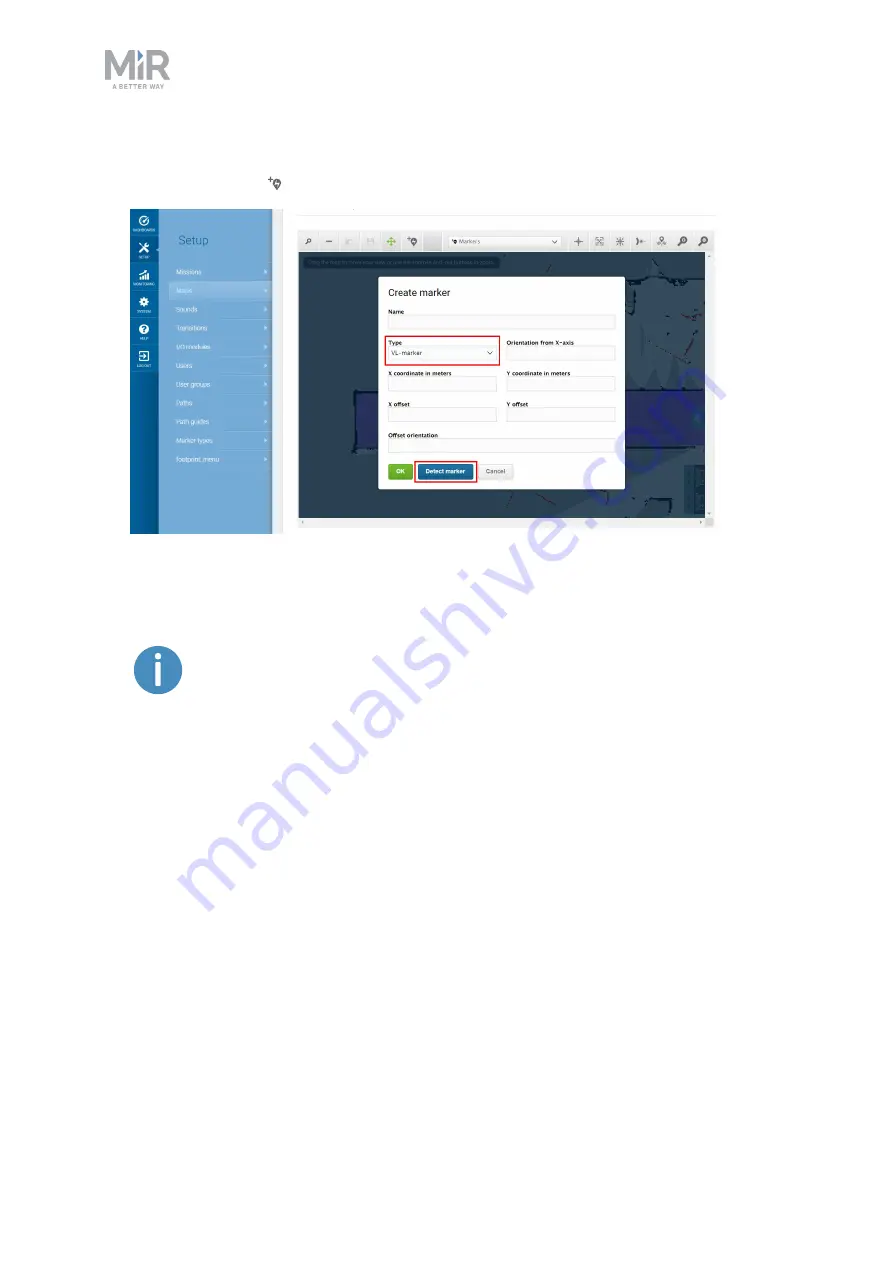
Within the editor, select
Markers
in the
Object-type
drop down menu, and then select
Draw new marker
on the editor tools bar. Choose
VL-marker
and then
Detect marker
.
The X, Y, and orientation values will automatically be filled out with the current position
of the robot. Set the offsets to 0. If you want to dock to the marker in reverse, set the
Offset orientation
to 180.
If the robot is too far from the VL-marker, a message that the robot failed
to locate the marker is displayed. Try moving the robot closer, and ensure
that the front safety laser scanner is positioned in front of the VL-marker.
5.
Select
OK
to create the marker. The marker is now visible on the map.
Docking to a VL marker in a place shelf mission
1.
In
System > Settings > Docking
, set
Relative move target when docking to markers
to
1,6 m. This will make the robot go to a position 1,6 meters in front of the marker before
docking. Select
Save changes
.