
















7. Getting started
MiR600 Quick Start (en) 08/2021 - v.1.1 ©Copyright 2021: Mobile Industrial Robots A/S.
52
To charge MiR600 using the cable charger, follow these steps:
1.
Plug the cable charger into an AC power supply. Always make sure to connect the cable
charger to a power supply before connecting it to the robot. Overtime, the battery will
take damage if you connect the charger to the battery before the power supply.
2.
Connect a battery adapter to the other end of the cable charger.
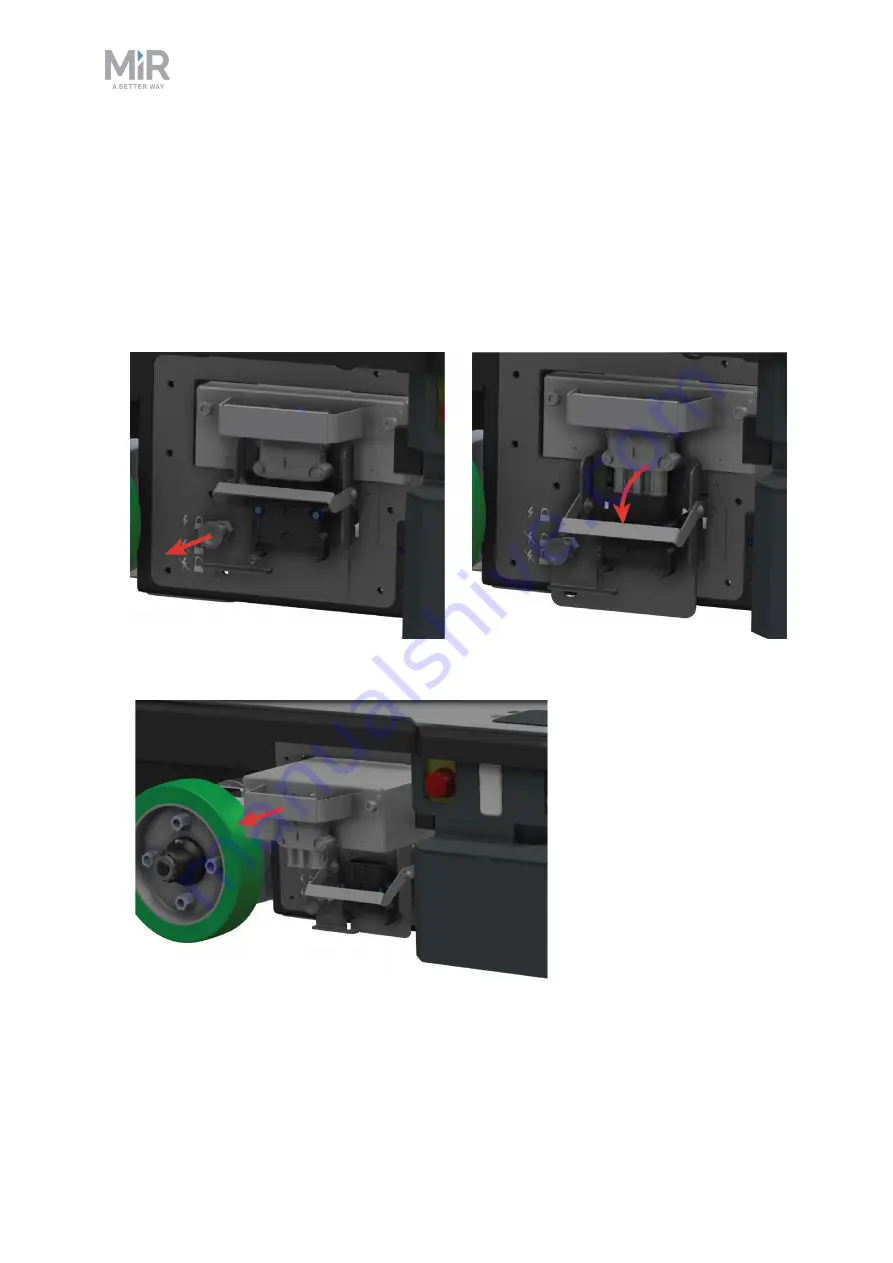
3.
On the robot, pull out the Battery lock pin, and pull the Battery lever down to the bottom
position. The battery is now disconnected and unlocked.
4.
Grab the handle, and pull the battery out approximately 10 cm.