

















maxon motor
Operating Instructions
4-Q-EC Servoamplifier DES 70/10
5.1.6 Toggle controller mode (speed/current control) “Digital 2”
If the “Digital 2” input is not switched on (floating) or is connected to a voltage
higher than 2.4 VDC, the servoamplifier is configured to speed controller mode.
If the “Digital 2” input is connected to Gnd, the servoamplifier is configured to
current (torque) mode.
The “Digital 2” input is protected against overvoltage.
Input resistance
92 k
Ω
(+5 V)
13 k
Ω
(+24 V)
Internal pull-up resistance
22 k
Ω
a5 VDC
Speed control enabled
Minimum input voltage
+2.4 VDC
Maximum input voltage
+50 VDC
Current control enabled
Minimum input voltage
+0 VDC
Maximum input voltage
+0.8 VDC
Note
If the controller mode has been changed, a disable-enable process (refer to
5.1.2, “Enable”) must be carried out to activate the new mode.
5.1.7 Encoder
Encoder supply voltage
+5 VDC max. 100 mA
Maximum encoder frequency
1 MHz
Voltage value
TTL
Low
max. 0.8 V
High
min. 2.0 V
Internal Line Receiver
EIA standard RS-422
It is recommended to use an encoder with built-in line driver.
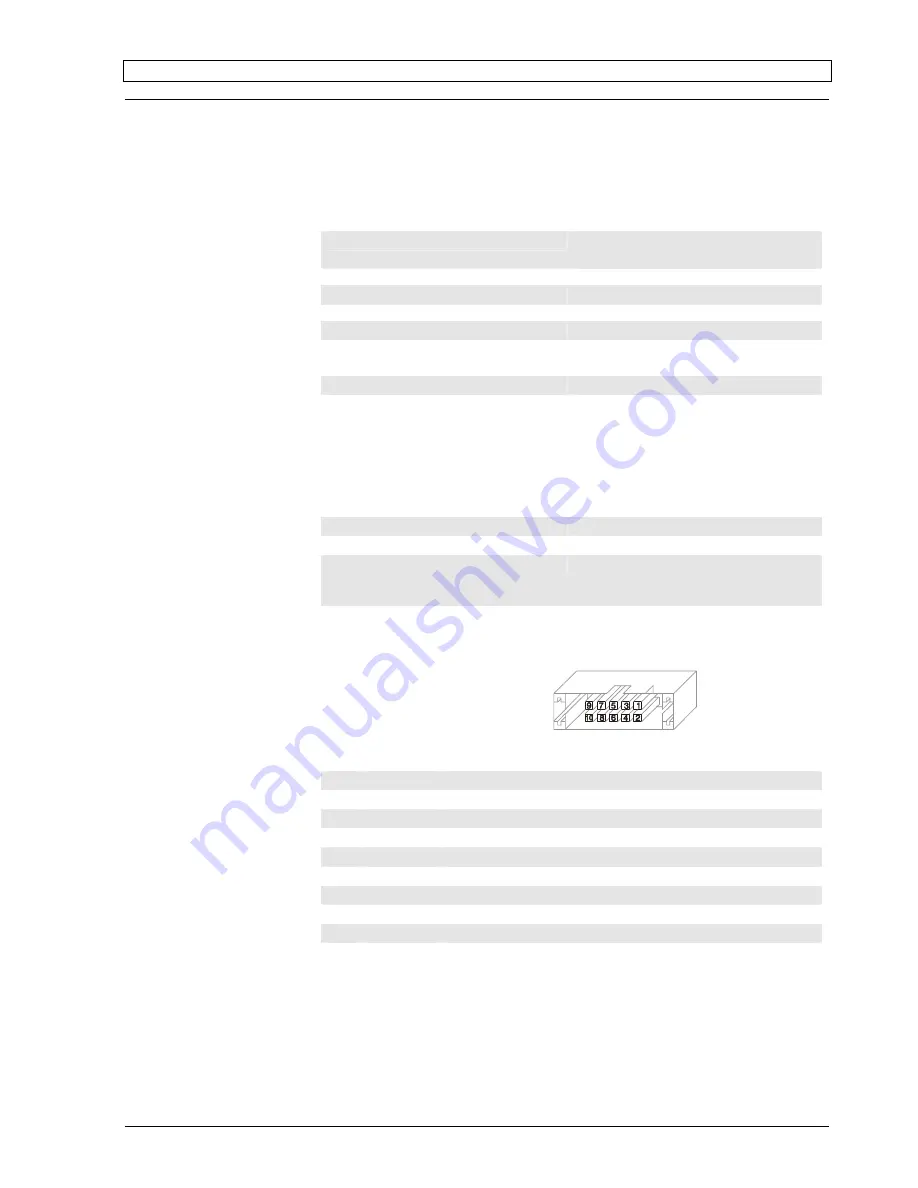
Male connector (front view)
Pin configuration at “Encoder” input:
1
n.c.
Not connected
2
+5 V
+5 VDC max. 100 mA
3
Gnd
Ground
4
n.c.
Not
connected
5
A\
Inverted channel A
6
A
Channel
A
7
B\
Inverted channel B
8
B
Channel
B
9
I\
Inverted channel I
10
I
Channel
I
This pin configuration is compatible with the flat cable plugs of the HEDL 55xx
encoder (with line driver) and the MR encoders with line driver, type ML and L.
Note
The standard encoder adjustment (original packing) refers to a 500-counts per
turn encoder. For other encoders, the adjustment must be modified with the soft-
ware (GUI).
April 2006 Edition / Subject to change
maxon motor control
9





















































