

























Kollmorgen Operation
Information
SERVOSTAR
®
S/CD Product Family
31
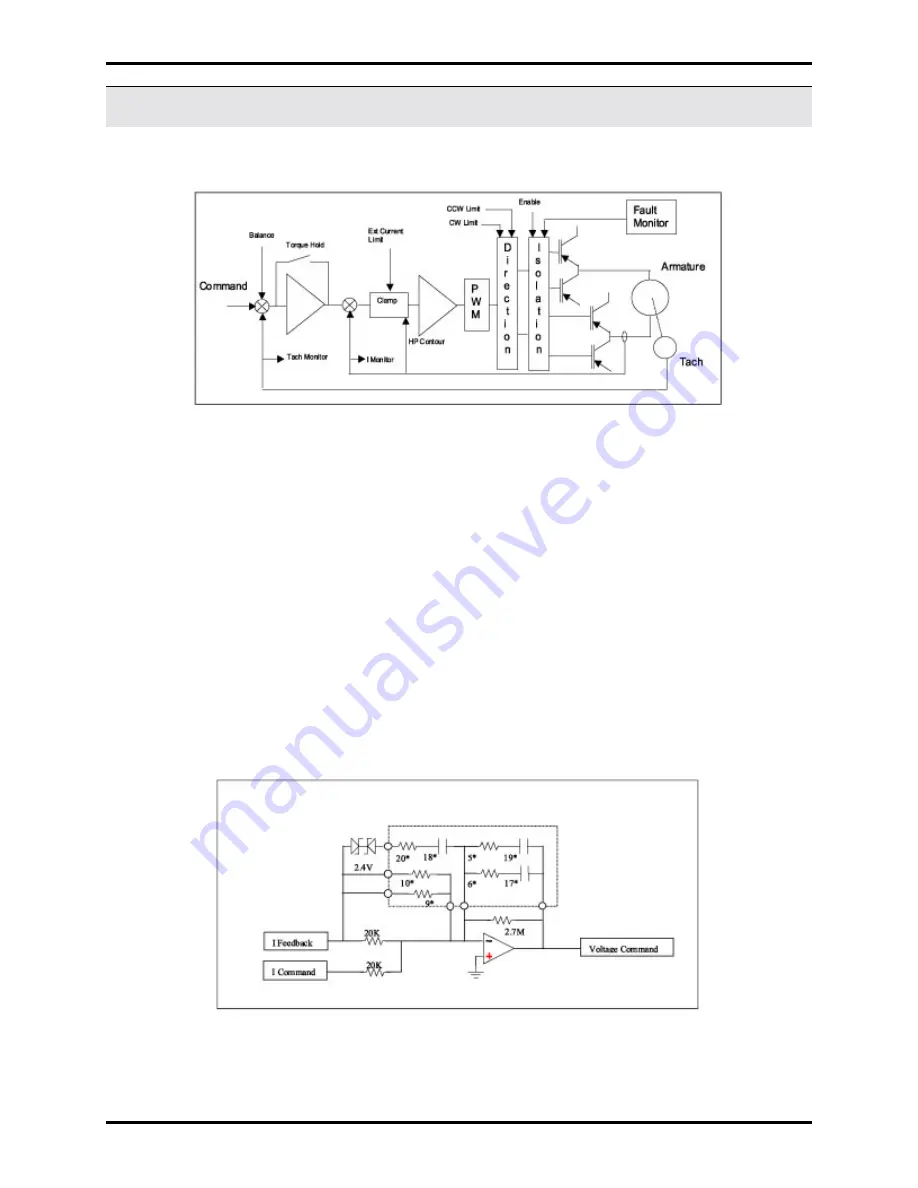
CONTROL LOOPS
The SERVO
STAR
provides high performance motor control by controlling motor current with an inner
current loop which is controlled by an outer velocity loop.
Each servo loop (current and velocity) is subject to a compensation network (as described below) to allow
appropriate servo loop tuning. In addition, the current loop is subject to clamping protection for current
limiting due to input request, compensation limits, or commutation limits, as described below.
Current Loop
Since current and torque are proportional in a Permanent Magnet (PM) motor, the current loop is often
referred to as the torque loop. The purpose of the current loop is to control the current through the motor
for protection and the creation of output torque. The commanded current is compared against the actual
motor current, allowing any error between the two to adjust the voltage at the motor terminals by raising
or lowering the current appropriately. The amount of current supplied by the current loop is a function of
commands, drive size ratings, and clamp conditions (see below).
The ability to supply current to drive the motor and the ability to remove energy from the motor while
being able to command the motor in either direction are characteristics referred to as four-quadrant
operation. During deceleration, energy must be removed from the motor. This energy is pumped back into
the capacitors on the DC Bus. This action is referred to as regeneration or regen. The energy causes the
bus voltage to raise. The drive monitors this bus voltage for unsafe levels and shuts the drive down in an
over-voltage fault, if the voltage gets too high.
StockCheck.com






































































