













DragonflyVR™
SETUP AND USER MANUAL
Page 12 of 14
©2016 Iris Dynamics Ltd.
03-200-001_A0.docx
www.irisdynamics.com
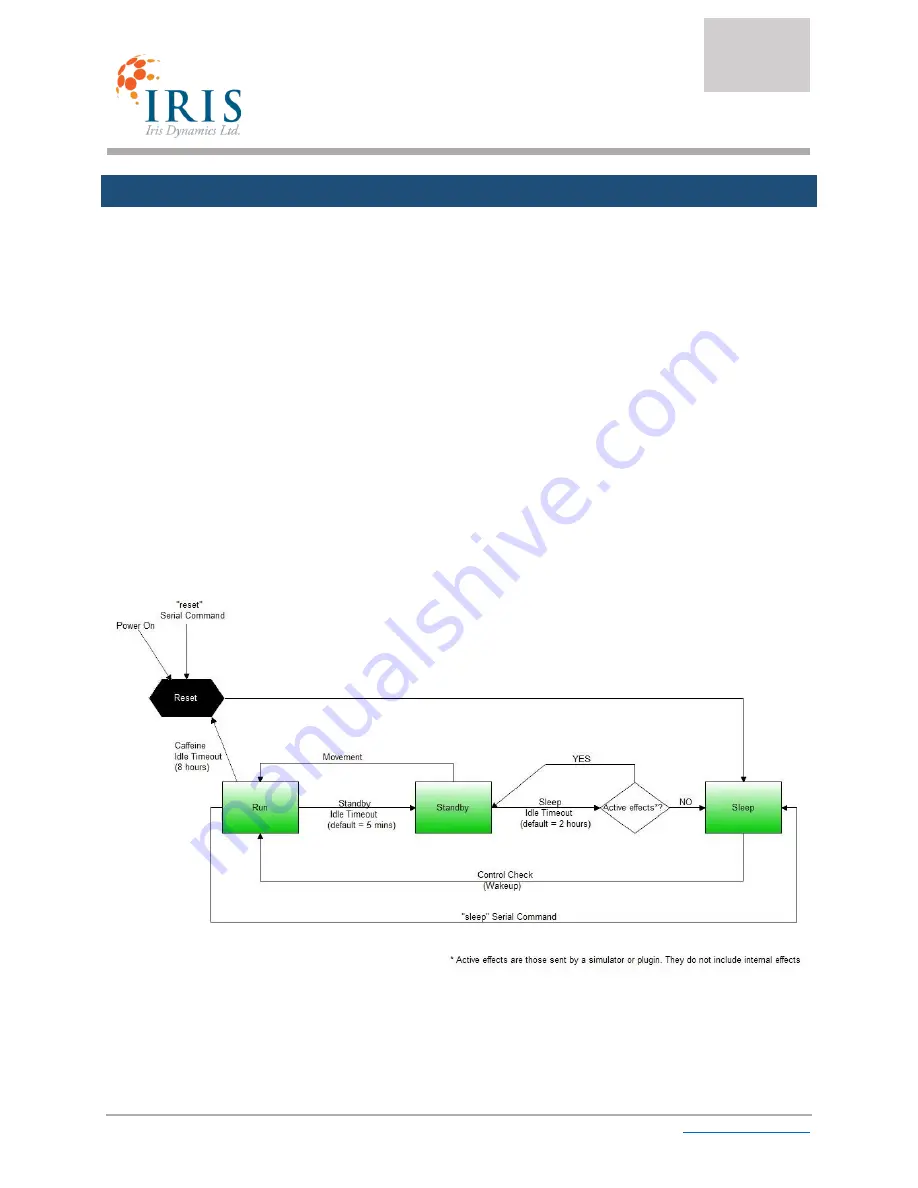
6.
STATES EXPLAINED
6.1.
Active State
In this state your DragonflyVR™ Flight Yoke System will behave like a control loading / haptic / force-
feedback controller. It could either be applying its default centering forces with an adjustable center
position using the trim switch, or it could be applying external forces sent through the USB interface.
6.2.
Standby State
When the yoke hasn’t moved for a while it will go into a standby mode. In this mode the power to many
elements is shut off. The yoke continues to send its position and continues to respond to external force
commands. As soon as any motion in either axis is detected, the yoke goes back to active state. The
default timeout duration can be set using serial command “standby_timeout ####”.
6.3.
Sleep State
In sleep state, the yoke will not transmit USB data, and will not apply any forces or make any noises. It is
essentially off. To wake the yoke up, perform a “control check” by moving the yoke forwards,
backwards, and to its limit of travel left and right in a smooth motion. Once you’ve performed the
control check, the yoke will wake up.