

























Optidrive ODE-2 User Guide Revision 3.20
www.invertekdrives.com
17
6
Pa
ra
m
eter
s
6.
Parameters
6.1.
Standard Parameters
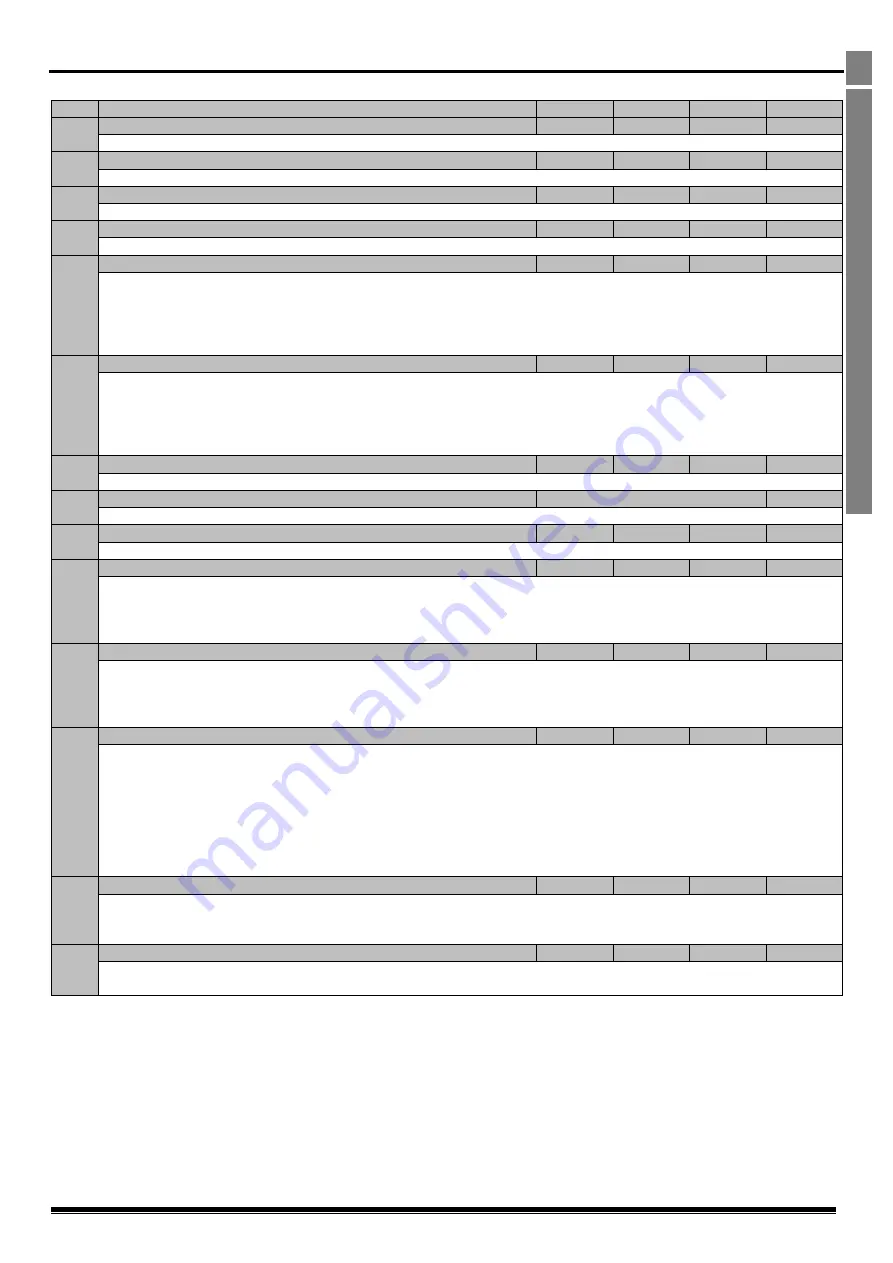
Par.
Description
Minimum
Maximum
Default
Units
P-01
Maximum Frequency / Speed Limit
P-02
500.0
50.0 (60.0)
Hz / Rpm
Maximum output frequency or motor speed limit – Hz or rpm. If P-10 >0, the value entered / displayed is in Rpm
P-02
Minimum Frequency / Speed Limit
0.0
P-01
0.0
Hz / Rpm
Minimum speed limit – Hz or rpm. If P-10 >0, the value entered / displayed is in Rpm
P-03
Acceleration Ramp Time
0.00
600.0
5.0
s
Acceleration ramp time from 0.0 to base frequency (P-09) in seconds.
P-04
Deceleration Ramp Time
0.00
600.0
5.0
s
Deceleration ramp time from base frequency (P-09) to standstill in seconds. When set to 0.00, the value of P-24 is used.
P-05
Stopping Mode
0
2
0
-
0 : Ramp To Stop
. When the enable signal is removed, the drive will ramp to stop, with the rate controlled by P-04. If the mains
supply is lost, the drive will try to continue running by reducing the speed of the load, and using the load as a generator.
1 : Coast to Stop
. When the enable signal is removed, or if the mains supply is lost, the motor will coast (freewheel) to stop
2 : Ramp To Stop
. When the enable signal is removed, the drive will ramp to stop, with the rate controlled by P-04. If the mains
supply is lost the drive will ramp to stop using the P-24 decel ramp with dynamic brake control.
P-06
Energy Optimiser
0
1
0
-
0 : Disabled
1 : Enabled
. When enabled, the Energy Optimiser attempts to reduce the overall energy consumed by the drive and motor when
operating at constant speeds and light loads. The output voltage applied to the motor is reduced. The Energy Optimiser is intended
for applications where the drive may operate for some periods of time with constant speed and light motor load, whether constant
or variable torque.
P-07
Motor Rated Voltage
0
250 / 500
230 / 400
V
This parameter should be set to the rated (nameplate) voltage of the motor (Volts)
P-08
Motor Rated Current
Drive Rating Dependent
A
This parameter should be set to the rated (nameplate) current of the motor
P-09
Motor Rated Frequency
25
500
50 (60)
Hz
This parameter should be set to the rated (nameplate) frequency of the motor
P-10
Motor Rated Speed
0
30000
0
Rpm
This parameter can optionally be set to the rated (nameplate) rpm of the motor. When set to the default value of zero, all speed
related parameters are displayed in Hz, and the slip compensation for the motor is disabled. Entering the value from the motor
nameplate enables the slip compensation function, and the Optidrive display will now show motor speed in estimated rpm. All
speed related parameters, such as Minimum and Maximum Speed, Preset Speeds etc. will also be displayed in Rpm.
P-11
Voltage Boost
0.0
20.0
3.0
%
Voltage boost is used to increase the applied motor voltage at low output frequencies, in order to improve low speed and starting
torque. Excessive voltage boost levels may result in increased motor current and temperature, and force ventilation of the motor
may be required. A suitable setting can usually be found by operating the motor under low load or no load conditions at
approximately 5Hz, and adjusting P-11 until the motor current is no more than 80% of the rated full load current.
P-12
Primary Command Source
0
6
0
-
0: Terminal Control
. The drive responds directly to signals applied to the control terminals.
1: Uni-directional Keypad Control
. The drive can be controlled in the forward direction only using an external or remote Keypad
2: Bi-directional Keypad Control
. The drive can be controlled in the forward and reverse directions using an external or remote
Keypad. Pressing the keypad START button toggles between forward and reverse.
3: Modbus Network Control.
Control via Modbus RTU (RS485) using the internal Accel / Decel ramps
4 : Modbus Network Control.
Control via Modbus RTU (RS485) interface with Accel / Decel ramps updated via Modbus
5 : PI Control.
User PI control with external feedback signal
6 : PI Analog Summation Control.
PI control with external feedback signal and summation with analog input 1
P-13
Trip Log History
N/A
N/A
N/A
N/A
Previous 4 trips stored in order of occurrence, with the most recent first. Press UP or DOWN to step through all four. The most
recent trip is always displayed first. UV trip is only stored once. Further fault event logging functions are available through
parameter group zero.
P-14
Extended Menu Access code
0
9999
0
-
Set to “101” (default) for extended menu access. Change code in P-37 to prevent unauthorised access to the Extended Parameter
Set







































































