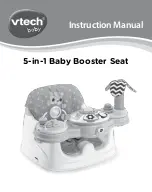
Angle of
incidence
Slide
Approx. 0.08 in.
in clearance
90°
After switching-on the gyro requests availability of a signal at the sensitivity
channel. If there is no signal the gyro works untill to next switching-on with the
sensitivity which has been adjusted by potentiometer. The jumper "Heading
Lock Mode" on/off decides whether the gyro will operate in the normal or
holding mode. If at the moment of switching-on the jumper was not set the
gyro will work till to the next switching-on in holding mode, if the jumper is set
the gyro works in normal mode.
With the aid of the reverse jumper the direction of gyro action can be
reversed, the processor again sends a query at the moment of switching on
and the state of operation is valid till to the next switching-off. You can
alternatively reverse the servo travel by means of turning the gyro axis of
rotation by 180 degrees.
After installation the tail servo must be mechanically aligned first.
For this purpose switch to normal gyro mode. The joystick and trim tab of the
transmitter must be in middle position. Corresponding to the stick and trim
tab middle position the servo arm must be exactly perpendicular to the tail
boom in order to achieve exactly the same travel to both directions. The arm
of the tail tie rod must also be perpendicular to the tail boom.
In order to achieve this you will either have to shift the servo longitudinally
(ECO-heli), or adjust the tie rod so far untill the tail rotor blades will attain the
desired angle of incidence (approx. 3..7°) as recommended by the manu-
facturer. Watch out for rod binding and keep backlash at a minimum. Also
watch out that the tail rotor slide does not hit the mechanical stops at both
end positions.
Reverse Operation
Basic Mechanical Adjustment
Page 2
Attention: Before first flight attempts check the direction of the gyro
effect. In case of a reversed direction of gyro effect your model may
crash due to uncontrollable pirouettes.
If you rotate the helicopter about its main rotor axis to the left the
gyro must produce a tail rotor deflection which in flight would have
the effect of a right rotation of the model about its rotor axis and vice
versa. Gyro beginners better ask an experienced clubmate for help.
Adjustment/Trimming
We recommend to find first the adjustment of the necessary maximum
sensitivity. This corresponds with the point at which the tail stops wagging
(swinging) and the gyro develops its highest effect, that is when it shows best
holding ability.
To the purpose of adjustment turn the gyro potentiometer clockwise to 100%
till to its travel stop corresponding to full sensitivity. Then adjust at your
transmitter approximately 2/3 of maximum servo travel, which approximately
corresponds to 100% (from 0...150%) on a JR radio. Higher values mean
higher sensitivity and also a higher inclination to oscillations, lower values
mean lower oscillation tendency.
Switch the gyro to the holding mode by remote control or by application of the
jumper and apply full stick travel at the sensitivity channel. Still on ground trim
to an extent until the servo does not show any recognizable tendency to run
into one of its end positions. Then lift slightly off and check again the correct
direction of gyro effect. Then lift off fully into hovering and trim until the
helicopter shows no tendency to turn in any direction. This requires a lot of
patience. In order to go safe do not lift off too high and if any oscillation occurs
land immediately.
Warranty
Safety directions
Operating directions
This quality product has been thoroughly checked before delivery. Nevertheless, in case of complaints your
warranty claims will be handled in accordance with our current General Sales Conditions. If equipment
returned for warranty repair shows full functionality during the entry inspection, handling charge will be
DM40,-. According to our experience the product works well with all current R/C systems. On the other hand
we cannot grant functionality with a specific R/C system due to the fact that control pulse conditions of
receivers are not liable to standardization. We must as well reject any responsibility for consequential
damage arisen from the use of our products since we are not able to supervise
their appropriate
application.
The CE-label is no allowance for negligent handling of the equipment. Avoid dangerous areas of motors,
propellers, gears and rotor blades. Always consider electric systems as potentially dangerous. Always
remove the battery if you intend to work on the system. Avoid direct and condensed humidity. The product is
not protected against reversal of polarity. Reversing polarity or cables can entail irreparable damages.
Plugs and sockets must always fit perfectly. Improvisations can give rise to damages. Care about the power
consumption of the power supply, especially with regard to the gyro. A higher power consumption than
assigned for can damage the power supply and other equipment connected to it. Never disconnect an
electrical appliance from the battery as long as it is operating.
The transmitter must always be switched on first and subsequently the receiver. Make sre that the throttle
stick is in the low throttle position. In any case verify that you are exclusive user of the selected frequency
and nobody else is using it. Pay attention to the CE-labels of other components. Provide motors with at least
2 noise suppressing ceramic capacitors 10 - 100 nF/63 - 100 V and optional with further noise suppressing
means (filters, chokes). Route the antenna at least 1" away of motor, battery, speed controller and their
cables. Install the receiver as far away as possible of motor, battery and speed controller. Keep cables as
short as possible. Motor and battery cables should be twisted. For the purpose of storing your model remove
the batteries and store it at a dry place with normal air humidity. Should the system act erratically, disconnect
the flight battery from the system and reconnect it again after a waiting period of 5 - 10 s.
Specifications are subject to change without prior notice.
Change the servo travel at the transmitter up or down until the tail in flight arrives
at the verge of oscilation or just stops oscillating.
If the adjusted value on a JR radio becomes lower than 80% you must decrease
the servo travel mechanically.To that purpose insert the tie rod at the servo arm
one hole closer toward the servo axis, at the ECO-heli you may additionally
move the rear hinge (at the tail) one hole further outward. There are, of course,
other factors which influence the flight behaviour, especially linkage play, a heli
design configuration which is too flexible or too stiff, or the gyro support itself
may influence the flight characteristic of the whole system.
Now land the helicopter.
If your transmitter contains a memory save the trim adjustments or the complete
program.
Switch to normal mode and start again. Retrim until your model stops turning
away and store the new trim values or the complete adjustment under a new
program.
Watch out that the tail rotor slide does not hit the mechanical stops at both end
positions, on both sides of the slide there should remain a clearance of at least
0.08 in.
Programming of your transmitter should ensure switching of the trim value
memory or of the complete programs if you switch from holding mode to normal
mode.
In this mode the gyro for the most part holds the longitudinal heading of the
helicopter, there is no tendency to turn into wind direction as in conventional
mode. Now you can without the problem of weathercocking fly backwards and
sideways even in gusty weather. But in holding mode you are obliged to control
turns about the vertical axis more consciously as the gyro tries to keep the
heading of the longitudinal axis constant.
If you own a PC you can carry out further fine adjustments with the aid of an
optional PC-interface cable.
Particularly the flight characteristics can be optimized if you were not successful
enough when following our above advices.
In the holding mode there is no additional mixing of tail equalizing or gas allowed,
in normal mode you still can use mixers as before. Stick authority mixing in the
transmitter is unnecessary as the
provides a built in automatic stick
authority system ("stick priority").
The gyro connections to JR PCM-receivers are as follows
ZPCM:
Channel 4 and channel 7
SPCM:
Channel 4 and channel 7 or 8
PCM20:
Channel 4 and channel 9
(Channel 4: servo, channel 7/8/9: sensitivity)
The gyro can be connected to Futaba-PCM-receivers after modification of
parameters saved in the gyro EEPROM. At the moment it is necessary to send
the gyro for reprogramming to the manufacturer.
Flight Behaviour in Heading Lock Mode
PC-Interface
Mixers/Transmitter Stick Authority
Connections to PCM receivers
Profi Gyro