





















mobileIoT gateway
CR3145
9
Object
Index
Subindex
Type
Default
Description
Gyroscope – Z-
axis
0x544D
0x05
R32
ro
—
Current acceleration Z-axis (unit: °/second)
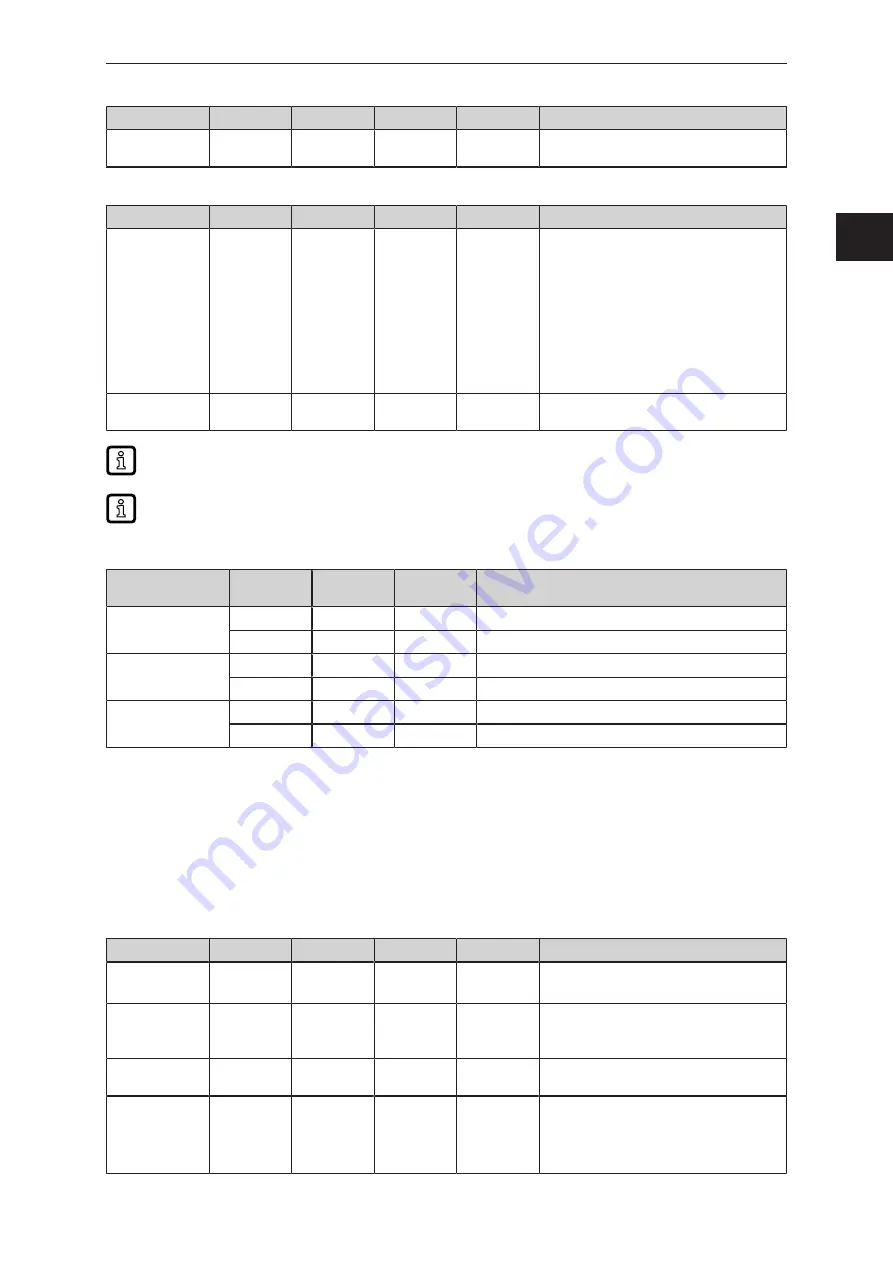
The unit can send this data via the CAN interface. The configuration is made via the following objects:
Object
Index
Subindex
Type
Default
Description
DeviceMode
0x4001
0x02
U8
rw
—
Bit 0: compatibility mode with unit CR3114
(1 s cycle)
Bit 1: forward device status via CAN bus (1 s
cycle)
Bit 2: forward complete GNSS data via CAN
bus (1 s cycle)
Bit 3: forward input/output data via CAN bus
(1 s cycle)
Bit 4: forward acceleration and gyro-
scope data via CAN bus (100 ms cycle)
Movement Ba-
seID
0x4005
0x05
U16
0x500
COB ID start address for acceleration and
gyroscope data transmission (100 ms cycle)
All data available in the respective device mode are sent via the CAN1 interface.
The exact index and subindex can be found in the corresponding EDS file.
The acceleration and gyroscope data are mapped to the following CAN messages:
COB ID
Start byte
Length
(bytes)
Type
Object
Movement
0x00
0
4
R32
Acceleration – X-axis
4
4
R32
Acceleration – Y-axis
Movement
0x01
0
4
R32
Acceleration – Z-axis
4
4
R32
Gyroscope – X-axis
Movement
0x02
0
4
R32
Gyroscope – Y-axis
0
4
R32
Gyroscope – Z-axis
4.6 GNSS (global navigation satellite system)
The device has a GNSS receiver. The unit can forward the position data determined by the GNSS
receiver via the CAN bus or send it via the mobile network.
The device can evaluate signals from GPS, GLONASS and BeiDou satellites. Data from two
navigation systems can be evaluated simultaneously. This enhances the accuracy.
The GNSS data is accessed via the following objects:
Object
Index
Subindex
Type
Default
Description
Positioning – an-
tenna status
0x3333
0x13
U8
ro
—
0 = antenna damaged or missing
1 = antenna OK
Positioning – po-
sition data valid
0x3333
0x14
U8
ro
—
0 = position data invalid (no position detec-
tion)
1 = position data valid (position detection)
Positioning – ac-
tive satellites
0x5220
0x00
U8
ro
—
Number of currently active satellites
Positioning –
mode (GNSS)
0x5200
0x00
U8
rw
—
0 = GPS only
1 = GPS + GLONASS
2 = GPS + BEIDOU
3 = G BEIDOU
GB







































































