




HMR3500
2 www.honeywell.com
SPECIFICATIONS
Characteristics
Conditions
Min
Typ
Max
Units
Heading
Accuracy
(Clean Magnetic Environment)
Level
Pitch 0° to
±
30°
Roll 0° to
±
30°
-
0.5
0.75
0.75
1
(1
σ
)
Resolution
0.1
deg
Repeatability
3 sweeps, 0º to 360º, level
0.2
deg
σ
Pitch and Roll
Roll Range
Default orientation, rotation about X-axis
±
180°
deg
Pitch Range
Default orientation, rotation about Y-axis
±
80°
deg
Accuracy
Roll ±30º, Pitch ±30º
0.5
1
deg
σ
Null Accuracy
1
Level
±0.5
deg
Resolution
Level, 1-sigma, 100 readings
0.04
deg
Roll Repeatability
Roll ±70º
Pitch ±70º
0.2
0.2
deg
σ
Pitch Repeatability
Roll ±70º
Pitch ±70º
0.1
0.1
deg
σ
Magnetic Field
Range
Maximum Magnetic Flux Density
0.7
gauss
Resolution
1-sigma, 100 readings
0.45
milli-gauss
Dip Angle
Earth’s Vertical Field Component
-70
+70
deg
Linearity
0.2
%FS
Electrical
Input Voltage
Standard Product
2.5
5.0
5.2
volts DC
Power
Input Voltage 2.5 to 5.2V
300
mW
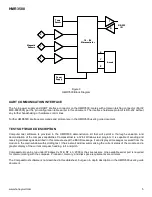
Digital Interface
UART
ASCII
4800
9600
38,400
Baud
Update Rate
Continuous Heading Updates
0.05
10
25
Hz
Format
Bi-directional binary packet data protocol.
RS-232
-
Physical
Dimensions
Circuit Board Assembly
1.97 x 1.65
x 0.52
inches
Weight
HMR3500 PCB only
HMR3500 with case, no cable
0.6
3.0
ounce
ounces
Connector
5-pin, 2mm pin spacing
-
Environment
Temperature
Operating
Storage (OEM only)
-40
-55
-
-
+85
+125
°C
°C
1
Null zeroing prior to use of the HMR3500 and upon exposure to temperature excursions beyond the Operating
Temperature limits is required to achieve highest performance.
* Tested at 25°C unless stated otherwise.

























































