Device Description HG G-7335xZB | English, Revision 06 | Date: 30.04.2020
50
Chapter 12 – Appendix
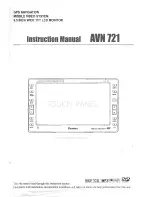
Figure 16
Band filter characteristics at 5 kHz (Q=20)
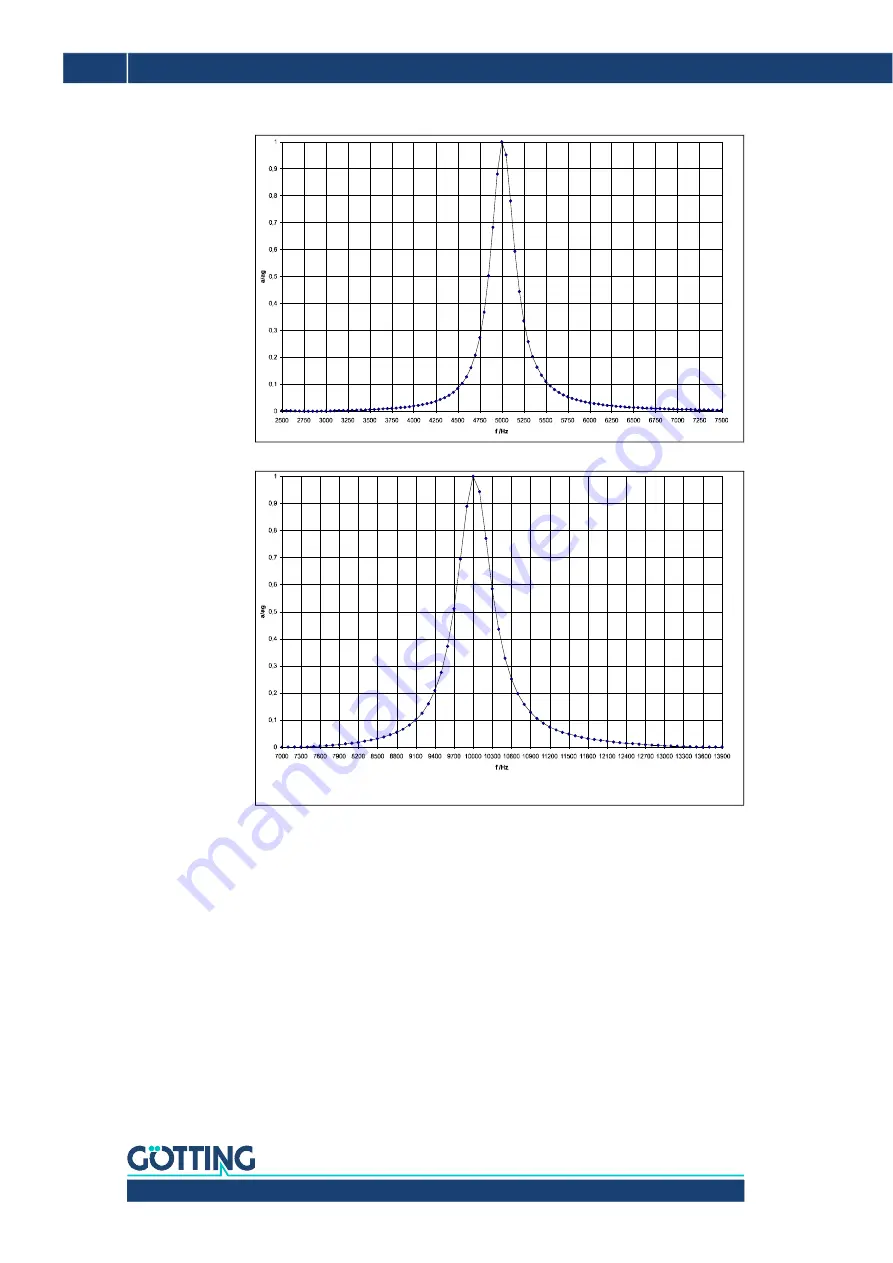
Figure 17
Band filter characteristics at 10 kHz (Q=22)
The Gotting HG G-7335 ZB Series comes with a comprehensive user manual that provides step-by-step instructions for seamless operation. You can easily download this manual for free from our website, ensuring you have all the necessary guidance to maximize your experience with this exceptional product.
Device Description HG G-7335xZB | English, Revision 06 | Date: 30.04.2020
50
Chapter 12 – Appendix
Figure 16
Band filter characteristics at 5 kHz (Q=20)
Figure 17
Band filter characteristics at 10 kHz (Q=22)