





























C141-E112-01EN
5 - 25
1) Multiword DMA transfer mode 2:
Sets the FR register = X'03' and SC register = X'22' by the SET FEATURES command
2) Ultra DMA transfer mode 2:
Sets the FR register = X'03' and SC register = X'42' by the SET FEATURES command
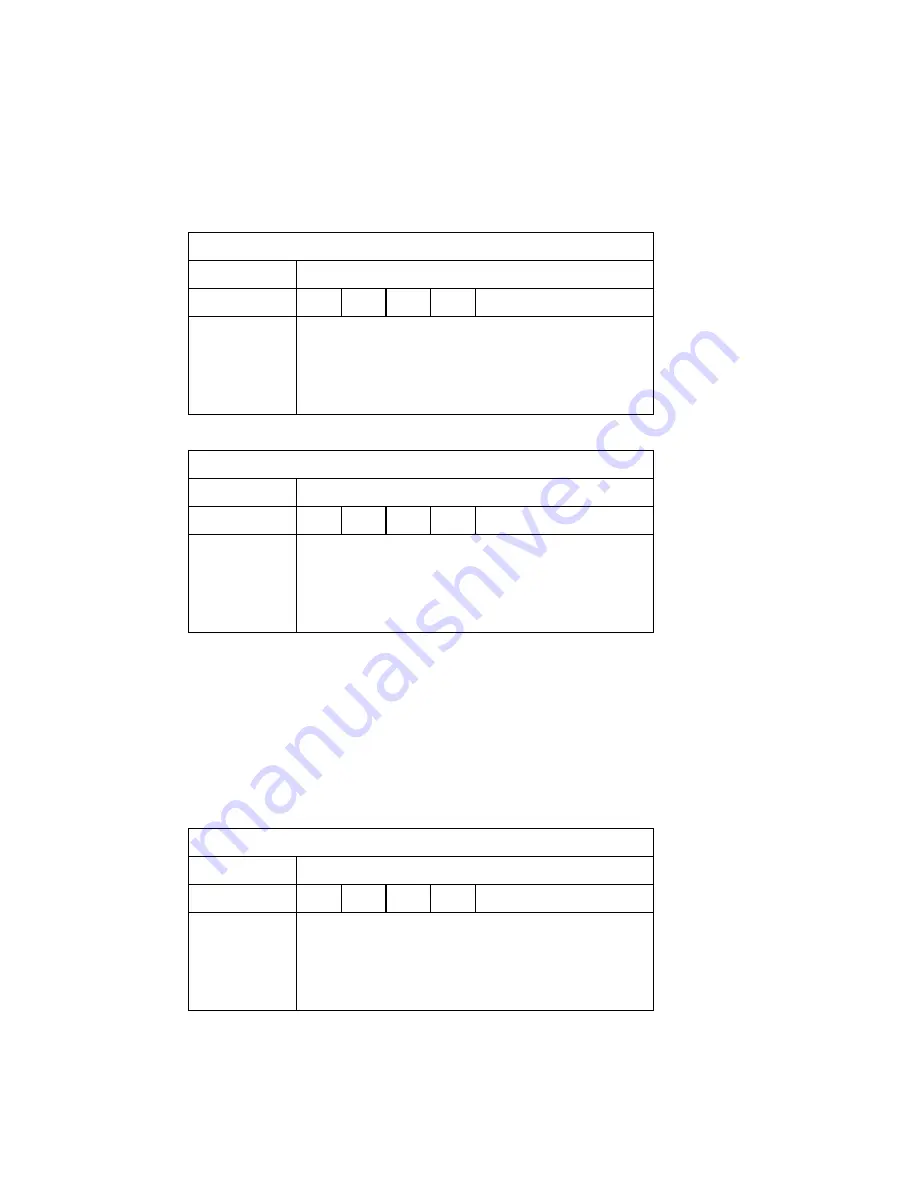
At command issuance (I/O registers setting contents)
1F7
H
(CM)
1
1
0
0
1
0
1
R
1F6
H
(DH)
×
L
×
DV
Start head No. /LBA [MSB]
1F5
H
(CH)
1F4
H
(CL)
1F3
H
(SN)
1F2
H
(SC)
1F1
H
(FR)
Start cylinder No. [MSB] / LBA
Start cylinder No. [LSB] / LBA
Start sector No.
/ LBA [LSB]
Transfer sector count
xx
R = 0 or 1
At command completion (I/O registers contents to be read)
1F7
H
(ST)
Status information
1F6
H
(DH)
×
L
×
DV
End head No. /LBA [MSB]
1F5
H
(CH)
1F4
H
(CL)
1F3
H
(SN)
1F2
H
(SC)
1F1
H
(ER)
End cylinder No. [MSB] / LBA
End cylinder No. [LSB]
/ LBA
End sector No.
/ LBA [LSB]
00 (*1)
Error information
*1 If the command is terminated due to an error, the remaining number of
sectors of which data was not transferred is set in this register.
(8)
WRITE VERIFY (X'3C')
This command operates similarly to the WRITE SECTOR(S) command except that the device verifies
each sector immediately after being written. The verify operation is a read and check for data errors
without data transfer. Any error that is detected during the verify operation is posted.
At command issuance (I/O registers setting contents)
1F7
H
(CM)
0
0
1
1
1
1
0
0
1F6
H
(DH)
×
L
×
DV
Start head No. /LBA [MSB]
1F5
H
(CH)
1F4
H
(CL)
1F3
H
(SN)
1F2
H
(SC)
1F1
H
(FR)
Start cylinder No. [MSB] / LBA
Start cylinder No. [LSB] / LBA
Start sector No.
/ LBA [LSB]
Transfer sector count
xx
Summary of Contents for MPG3102AH
Page 1: ...C141 E112 01EN MPG3xxxAH DISK DRIVES PRODUCT MANUAL ...
Page 3: ...This page is intentionally left blank ...
Page 5: ...This page is intentionally left blank ...
Page 9: ...This page is intentionally left blank ...
Page 17: ...This page is intentionally left blank ...
Page 33: ...C141 E112 01EN 3 2 Figure 3 1 Dimensions ...
Page 195: ......






































































