



INr4-GYB
接收机 Receiver
Http://www.flysky-cn.com
Copyright ©2022 Flysky Technology co., ltd
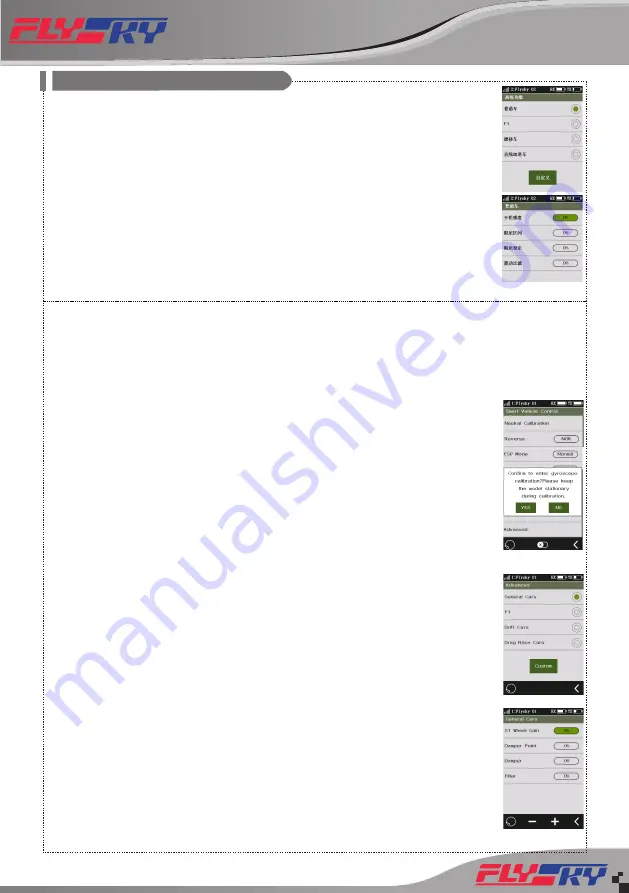
The smart vehicle control function is to control the vehicle throttle and steering channel intelligently through the
gyroscope. It can ensure that the vehicle is in the expected direction to maintain a better driving condition even
in case of bumpy roads or zigzagging. It is necessary to finish the parameter settings related to this function at
the transmitter side. Take Noble Pro transmitter as an example to introduce the meaning of related parameters,
including [Neutral Calibration], [Reverse], [ESP mode], [Steering Gain], [Throttle Gain], [Priority], [Gyroscope
Calibration] and [Advanced].
[Neutral Calibration]: Used for gyroscope to calibrate the steering and throttle neutral to make the best driving
condition when the vehicle is driving normally. Before enabling the smart vehicle control function, you need to
adjust the vehicle's steering servo volume, neutral trim and throttle neutral to the best driving condition. After
completion, start the SVC(Smart Vehicle Control) function for neutral calibration. It should be noted that the
neutral calibration is required after the adjustments of Trim. The steering and throttle need to be set to the neutral
position during the calibration process.
[Reverse]: Used to set the direction of the gyroscope in the mixing channel direction. By default, it is set to Normal.
[ESP mode]: Used to set the working mode of the gyroscope. It can be set to [Normal] or [Lock]. By default, it is
Normal mode. If it is set to Normal mode, when the vehicle is yawing or steering, the gyroscope automatically
provides an opposite compensation to control the servo to keep it stable or prevent it from drifting according to
the angular velocity generated.
• [Lock] The Lock mode is only effective when the steering wheel is kept in its self-centering state, (i.e., the vehicle
yaws), the gyroscope will control the servo in the opposite direction according to the yaw angle to make it travel
back to the expected direction.
Note: If the steering wheel is non-self-centering in the Lock mode, the operations
are the same as those in Normal mode.
[Steering Gain]:Used to set the correction wheel to travel in the expected direction. When the system detects that
the vehicle body is aboutto move away from the intended steering, it will automatically correct the body through
the wheel. Steering Gain is to adjust the correction strength of the wheels by the system. 0%: No gyroscope
assisting effect for the mixing servo. 100%: maximum gyroscope assisting effect.
[Throttle Gain]: Used to set the strength of the gyroscope intervening in the throttle adjustment. It is applied to the
case that the throttle output is reduced through mixing control by gyroscope to enable the car to change directions
quickly and safely when the vehicle turns with the throttle trigger unchanged.
[Priority]:Used to set the control rate of Steering Gain when the vehicle turns, that is, the turning radius. For
example, in the direction turning by using the traversing steering wheel, when the value is 0%, the mixing control is
the strongest, that is, the turning radius is the largest. When the value is 100%, the mixing control is 0%, that is, the
turning radius is the smallest.
[Gyroscope Calibration]: Calibration is required when the gyroscope is enabled for the first time or replaced. Before
calibration, keep the model in a stable and stationary state. Start the calibration. Then, the LED of the receiver will
be in twice- flash-one-off state. The calibration will automatically exit if it succeeds. If it fails, a prompt is given in a
pop-up window reminder.
[Advanced]: Use to be compatible with model drift cars, etc. You can set type of the model cars, and customize
parameters for [ST Wheel Gain], [Damper Point], [Damper] and [Filter].
• [ST Wheel Gain]: Adjustment of intervention ratio of steering operation to gyro control, It is more sensitive in the
steering control when the value increases.
• [Damper Point]: Adjusts the servo to the damper point in front of the target angle position. In the damping
interval, the servo oscillation speed will be slowed down. The higher the value, the larger the interval in which
the servo speed is slowed down.
• [Damper]: Slow down the servo speed in the damper point, and adjust the damping effect in the damper point.
The higher the value, the slower the servo slowing down in the damper point. As a result, it takes longer time for
the servo to reach the target angle. This parameter needs to be set together with [Damper point] to achieve the
best result.
[ 优先级 ] 设置设置车辆转向时,方向感度的控制比例,即转弯半径。例如转向时,当打方向手轮至最大行驶转弯时,
数值为 0 时,混控力度最大,即转弯半径最大,当数值为 100% 时,混控力度为 0%,转弯半径最小。
[ 陀螺仪校准 ] 第一次启用陀螺仪或更换陀螺仪时需进行校准。校准前,模型保持平稳静止状态,启动校准,此时
接收机 LED 灯两闪一灭,校准成功自动退出,若失败会弹窗提示。
[ 高级功能 ] 用于兼容漂移车等模型车。在此功能下,可设置模型车类型,可自定义 [ 手轮感度 ]、[ 阻尼区间 ]、[
阻尼设定 ] 和 [ 震动过滤 ] 参数。
• [ 手轮感度 ]:调整手轮控制输出比率,当数值增加时控制转向反应更快。
• [ 阻尼区间 ]:调整舵机到达目标角度位置前的阻尼区间。在阻尼区间内,舵机的摆动速度会被减慢。数值越高,
舵机速度被减慢的区间会越大。
• [ 阻尼设定 ] :在阻尼区间内减慢舵机速度,调整阻尼区间内的阻尼影响。数值越高,舵机在阻尼区间内的速
度会被减得越慢,舵机到达目标角度的时间越长。该参数需要搭配 [ 阻尼区间 ] 同时设置,以达到最佳效果。
• [ 震动过滤 ]:用于抑制抖动,数值越高抑制抖动越强。
注:
1. 仅 Noble Pro 发射机固件 1.0.2 及以上版本支持本接收机 SVC 的 [ 高级功能 ] 部分。
2. 若使用板控遥控器如 PL18 等,只能进行基础的使用,SVC 功能无法实现。
智能车控功能介绍
SVC Function Instruction







































































