















7
5.System Functions
This section focuses on the functions and how to use them.
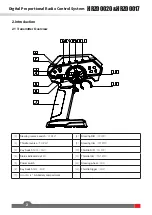
5.1 Channel Description
The transmitter outputs a total of 4 channels, which are assigned as follows:
• CH1:Steeringwheel. By default, clockwise rotation will make the channel data value increase. It supports the
settings of REV reverse, servo volume, and trim;
• CH2:Throttle trigger. By default, inward rotation of the trigger will make the channel data value increase. It
supports the settings of REV reverse, servo volume, and trim;
• CH3:Reset button AUX3. Channel value is switched when pressed. It is switched once per press. The default
output value at power-on is 1000 us;
• CH4:Reset button SW2. Channel value is switched when pressed. It is switched once per press. The default
output value at power-on is 1000 us;
Note: For the channel value range, when the default servo volume is 100%, it is 1000-2000 us;
when the servo volume is 120%, it is 900-2100 us.
When the AUX3 key is pressed, CH2 value is repeatedly switched between 900 us and 2100
us. Thus, the receiver can be cooperatively used for realizing the boat turning function.
5.2 Channel Reverse
ST.REV, CH1 direction inversion switch: left side: normal state; right side: reverse state.
TH.REV, CH2 throttle inversion switch: left side: normal state; right side: reverse state.
5.3 Trims
ST.TRIM, direction trim knob: by default, clockwise rotation indicates the value increase;
TH.TRIM, throttle trim knob: by default, clockwise rotation indicates the value increase;
Trim range: -250 us – 250 us. The trim adjustment is not controlled by servo volume D/R (i.e.,
memory trim);
By default, clockwise rotation indicates the trim positive adjustment (data increase). The
adjustment direction follows REV reverse synchronous change.
5.4
D/R
ST.D/R, direction servo volume adjustment knob: clockwise rotation indicates the servo
volume increase;
TH.TRIM, throttle servo volume adjustment knob: clockwise rotation indicates the servo
volume increase;
Adjustment range: 1-120%.
5.5 Failsafe
This function protects the user by preventing the model from behaving unexpectedly if
signal is lost.
The transmitter is default set as no signal output when facing malfunction as the Failsafe
Protection.







































































