





























Table 3.4 continued from previous page
Field ID
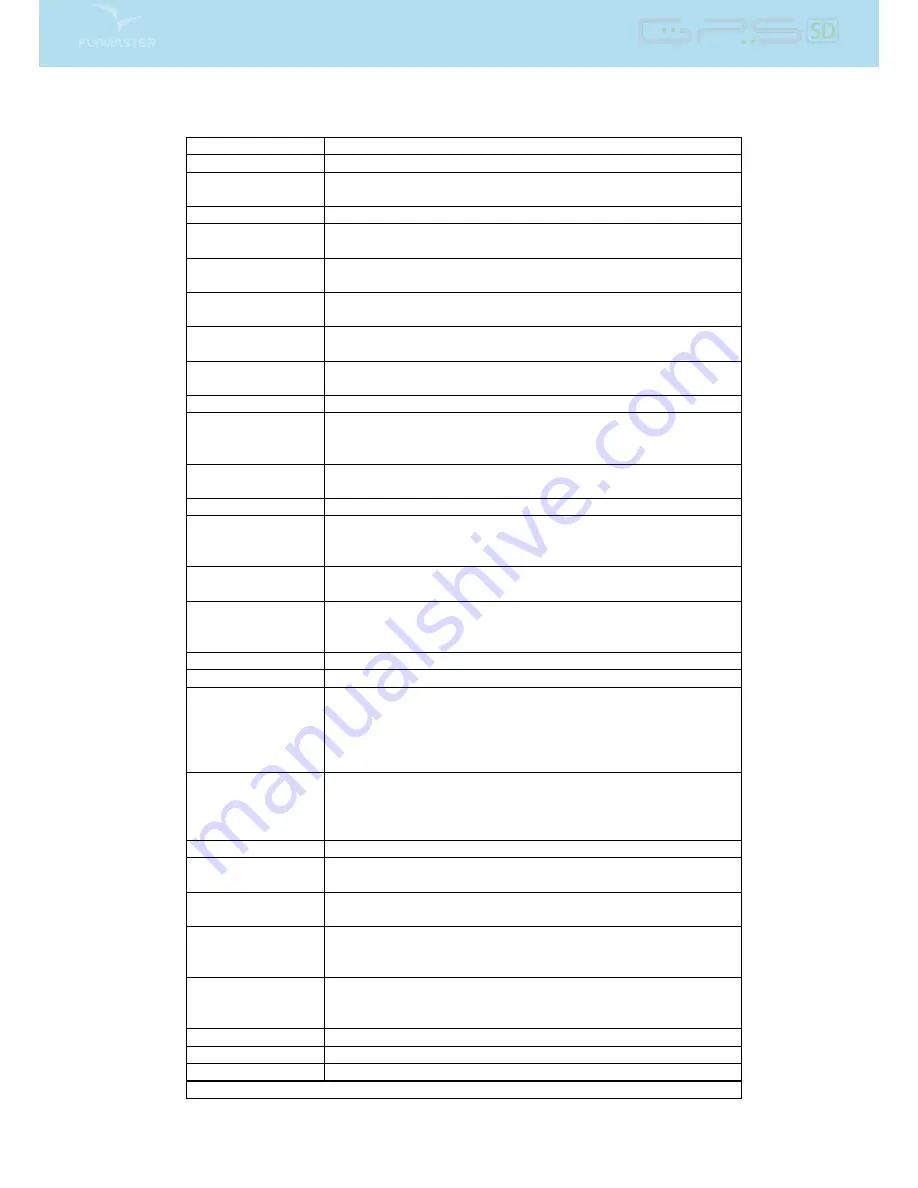
Description
Thermal top
The highest point reached during the current thermal.
Max.Alti
Maximum altitude reached during current ight. This is based on
barometric altitude.
GPS Alti
Altitude reported by the GPS.
Flight Level
Current altitude in hundreds of feet, based on a xed QNH of
1013.25hPa.
Altitude
Current altitude. This altitude is calculated based on the baro-
metric pressure and depends on the QNH value.
Altitude2
Second Altimeter which can be set independently to the main
altimeter.
MotorTemp
Motor Temperature (available when connected with Flymaster
M1).
RPM
Motor revolutions per minute (available when connected with Fly-
master M1).
Fuel
Fuel level in liters (available when connected with Flymaster M1).
Arrival Next
Estimated arrival height above the next waypoint. This means
that wind, day quality and glider performance are used in the
calculations.
Dist.To
Distance to take o is the distance between the current point and
the ight starting point.
Dist.Thermal
Shortest distance to last thermal core (thermal dot).
Dist.CTR
Distance to controlled airspace. When more than one airspace
area is in range the closest will be shown. When inside an airspace
area the distance shown is to the closest edge.
Alt.to CTR
Altitude to CTR shows altitude to controller airspace, a negative
number indicates we must sink to come out of controlled airspace.
CTR Status
Status message of airspace, will show Violating when in controlled
airspace, Immenent Alt when close to entering airspace vertically
or Pos.Immenent when close to entering airspace horizontally.
CTR Name
Name of the airspace causing warning or violation.
Abs.Pressure
Absolute atmospheric pressure value in Pascals.
Max.Climb
Once a ight has started, it shows the maximum rate of climb
encountered during the ight. This value uses the integrated vario
not the instantaneous rate of climb. This provides good indication
of the quality of the day's thermals. This value is reset when the
instrument is switched o.
Max.Sink
Once a ight has started shows the maximum sink encountered
during the ight. Note that these values are using the integrated
vario. When the instrument is switched o this value is reset back
to zero.
Vario
Instant vario value.
Ave.Vario
Average Vario calculated using an integration time constant in
order to indicate smoother climbing rates.
Speed
Indicates ground speed. The speed is only available when the GPS
receiver has a valid signal.
Max.Speed
Maximum Speed (returned by GPS) reached during the ight.
When the instrument is switched o this value is reset back to
zero.
Ave.Speed
Average ground speed calculated using a lter to show a smoothed
speed, eliminating erratic speed changes due to glider pitching,
etc.
Heading
Heading in degrees returned by GPS.
Bearing
Current bearing in degrees.
AveROT
Average rate of turn in degrees per second.
Continued on next page
17
Summary of Contents for GPS SD
Page 1: ...User manual Document version 1 0...
Page 46: ...Figure 4 35 GPS Reset 45...





















































