





























4
Installation
Festo – GDCP-CMMO-ST-EA-SY-EN – 2017-05c – English
75
4.3.4
[X3] STO
To establish ready status during start-up via FCT or web server and for control via I/O,
control inputs STO1/STO2 on [X3] must be enabled.
Circuitry without use of the STO safety function
If you do not need the integrated safety function STO in your application, to operate the
motor controller you must bridge Pins 1, 2 and 3 at the X3 interface. This deactivates the
integrated safety function! With this circuitry, safety in the application must be ensured
through other appropriate measures.
Circuitry with use of the STO safety function
The STO safety function (“Safe Torque Off ”) is described in detail in the documentation
GDCP-CMMO-ST-EA-S1. The STO function should only be used in the manner described in
this document.
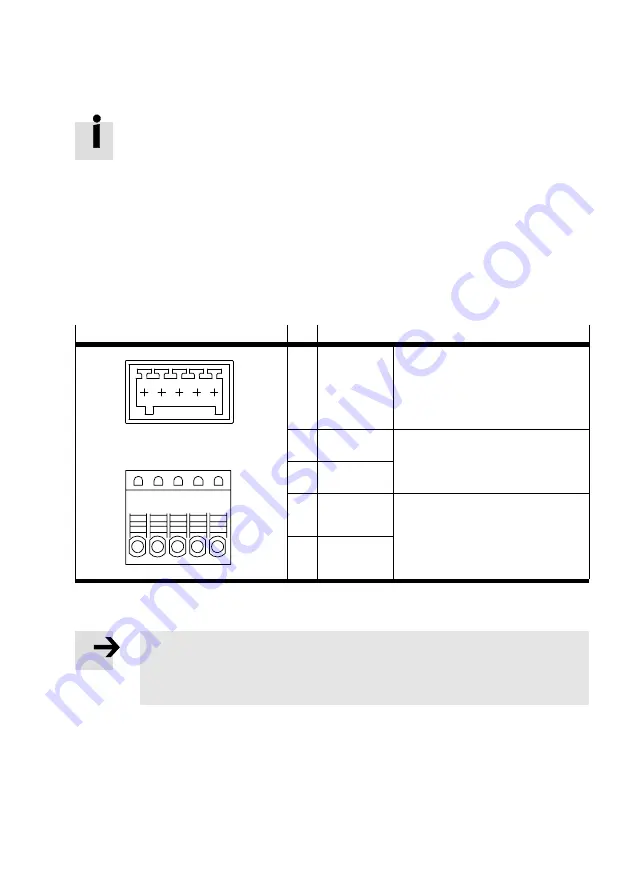
Connection
Pin
Function
X3
1
5
1
5
1
+24 V DC
LOGIC OUT
Logic voltage output
– Supply via [X9]
– Max. 100 mA
– No overload protection
2
STO 1
Control ports for STO function
3
STO 2
4
DIAG 1
Feedback contact
– Potential-free
– Low impedance if the STO func
tion has been requested and ac
tivated via two channels.
5
DIAG 2
1)
Reference potential (0 V) is pin 4 on connection [X9] power supply
Tab. 4.7
Connection STO [X3]
Note
Damage to the device in the event of an overload
Pin 1 (+24 V Out) is not overload-proof (max. 100 mA). The logic supply can be option
ally used to supply external, active sensors.







































































