



















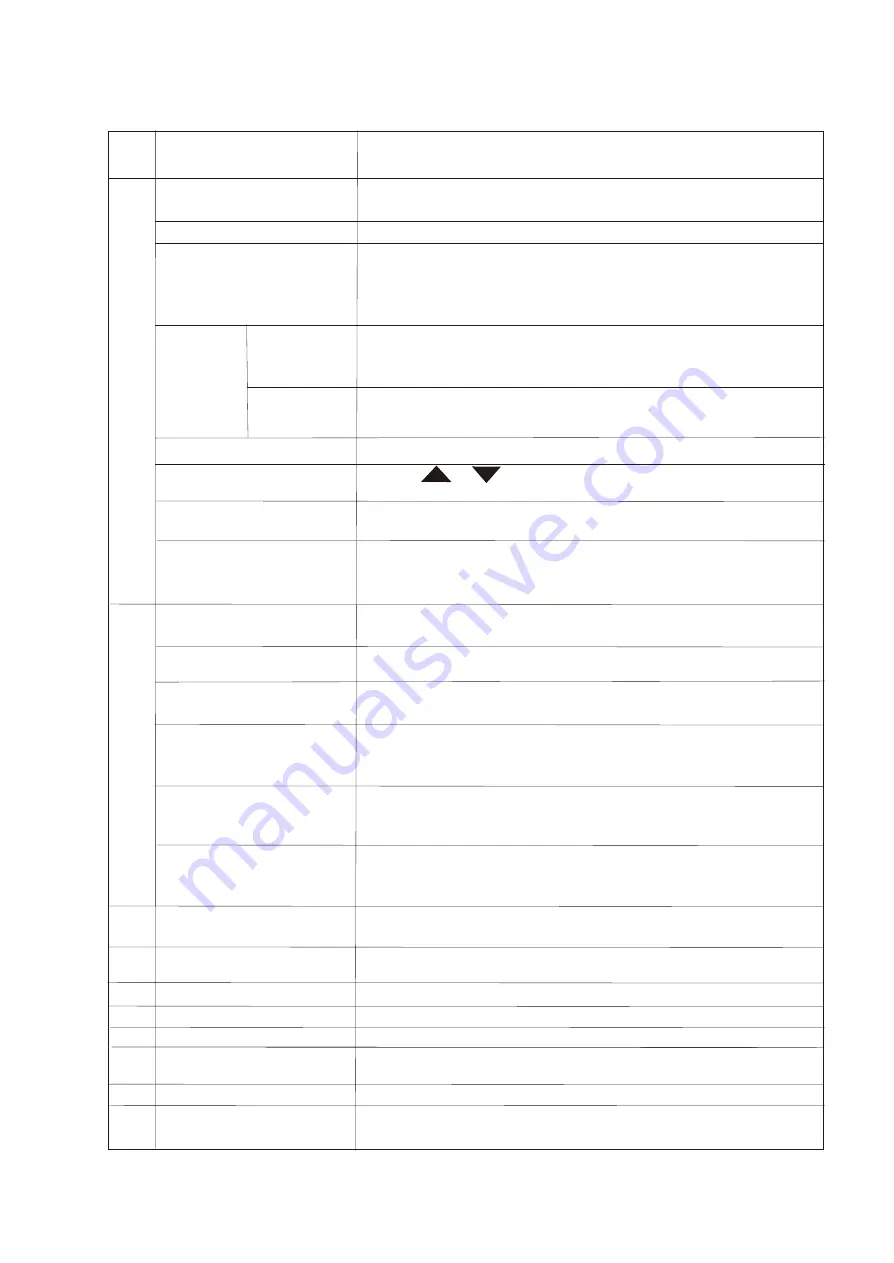
2.2 Common Specifications.
Control Method
Input Power Supply
Output frequency Range
Frequency Precision
Frequency Analog input
control
resolution Digital input
Output Resolution
Operating setting
Method
Analog setting
Method
Other function
Acceleration/Decel
time
Voltage/frequency
characteristics
Torque Control
Multi-function input
terminals
Multi-funciton output
terminals
Other functions
Digital Operator
monitor
Communication
Control
Ambient Temp
Ambient Humidity
Vibration
Instantaneous over
current
Over Load
Motor Overload
protection
PWM
415V Power Supply: 415+15%
220V Power Supply: 220+15%
0.10~400.00Hz
Within 0.1% of max. output frequency(25 C (53 F)+
10 C(+21.2 F)) during analog input & within 0.01% of the
set output frequency( )
during digital input
1% of Max operating frequency
0.01Hz
0.01 Hz
Press or 10 set
0-5V/0-10V, 4-20mA/0-20mA
frequency upper/lower limit, starting frequency stopping
frequency, three skip frequencies can be individually set.
Counter setting etc.
Four selectable combinations of independent acceleration
and deceleration setting Range: 0.1sec to 6500sec.
Set V/F curve at will.
Max Torque upto 10.0% max output voltage .The starting
torque can reach 150% of max output voltage at 1.0Hz.
6 multi-function input terminals for 8 multi-speed, counter
4 Accel/Decel time select, UP/DOWN command, external
emergency stop.
5 multifunction output terminals for the displaying and
warning of no- running, zero speed, counting and external
fault information.
Decelerating stop or self-stop, DC brake, auto restart
tracking, easy PLC auto energy-saving adjustable carrier
Frequency(Max 20KHz) etc.
Frequency command, output frequency, speed output
current, output voltage. DC bus voltage and of rotation.
Rs485
-10 C(-21.2 F) to 40 C(+84.8 F)
0-95% RH(relative humidity).
0.5G (0.5 x 9.8 = 4.9 m/s) or lower.
Approx. 200% rate current.
Inverter: 150% 1 minute
electronic thermal overload relay..
4







































































