
























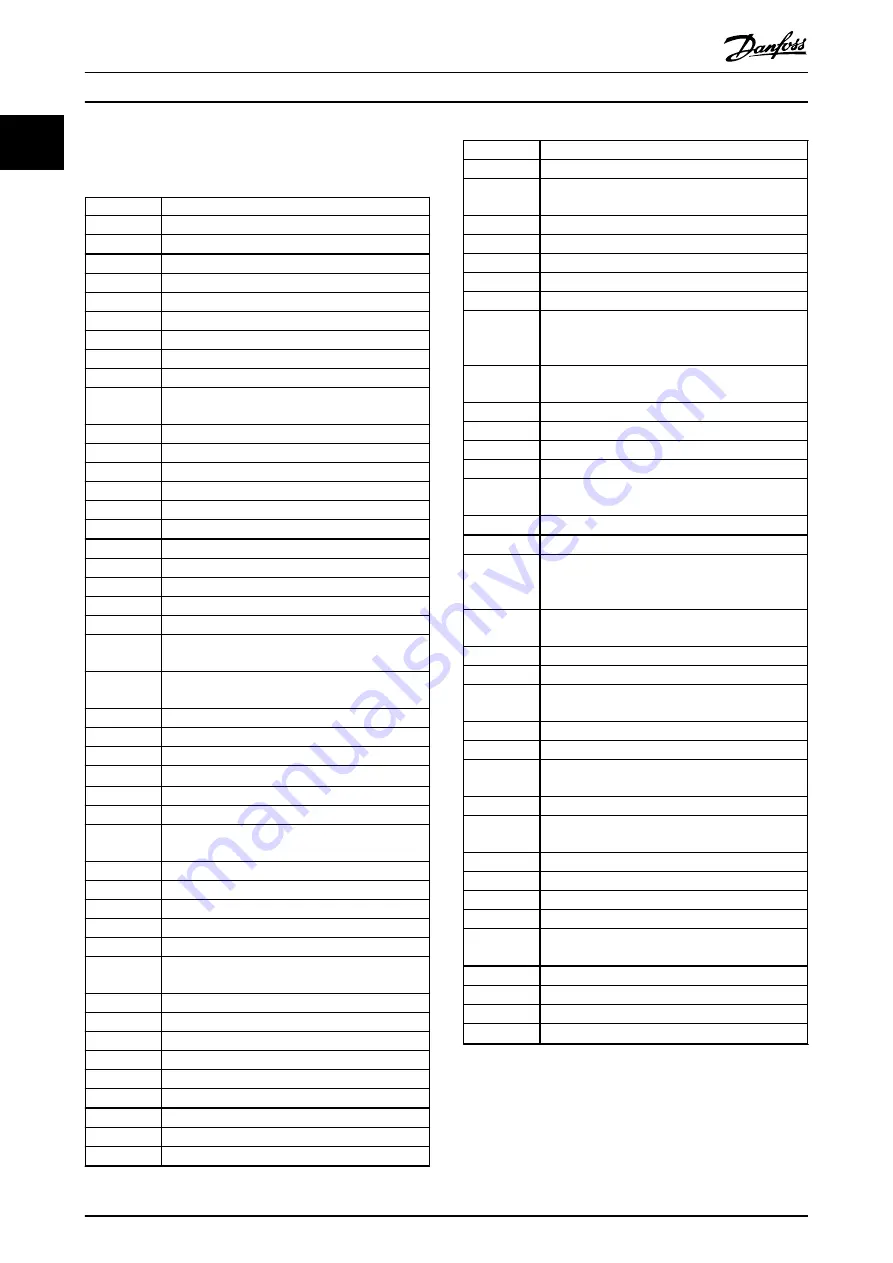
1.4 Abbreviations, Symbols and
Conventions
60
°
AVM
60
°
asynchronous vector modulation
A
Ampere/AMP
AC
Alternating current
AD
Air discharge
AEO
Automatic energy optimisation
AI
Analog input
AMA
Automatic motor adaptation
AWG
American wire gauge
°
C
Degrees celsius
CD
Constant discharge
CDM
Complete drive module: the frequency converter,
feeding section and auxiliaries
CM
Common mode
CT
Constant torque
DC
Direct current
DI
Digital input
DM
Differential mode
D-TYPE
Drive dependent
EMC
Electromagnetic compatibility
EMF
Electromotive force
ETR
Electronic thermal relay
f
JOG
Motor frequency when jog function is activated.
f
M
Motor frequency
f
MAX
Maximum output frequency, the frequency
converter applies on its output.
f
MIN
Minimum motor frequency from the frequency
converter
f
M,N
Nominal motor frequency
FC
Frequency converter
g
Gramme
Hiperface
®
Hiperface
®
is a registered trademark by Stegmann
HO
High overload
hp
Horse power
HTL
HTL encoder (10–30 V) pulses - High-voltage
transistor logic
Hz
Hertz
I
INV
Rated inverter output current
I
LIM
Current limit
I
M,N
Nominal motor current
I
VLT,MAX
Maximum output current
I
VLT,N
Rated output current supplied by the frequency
converter
kHz
Kilohertz
LCP
Local control panel
lsb
Least significant bit
m
Meter
mA
Milliampere
MCM
Mille circular mil
MCT
Motion control tool
mH
Inductance in milli Henry
mm
Millimeter
ms
Millisecond
msb
Most significant bit
η
VLT
Efficiency of the frequency converter defined as
ratio between power output and power input.
nF
Capacitance in nano Farad
NLCP
Numerical local control panel
Nm
Newton meter
NO
Normal overload
n
s
Synchronous motor speed
Online/
Offline
Parameters
Changes to online parameters are activated
immediately after the data value is changed.
P
br,cont.
Rated power of the brake resistor (average power
during continuous braking).
PCB
Printed circuit board
PCD
Process data
PDS
Power drive system: a CDM and a motor
PELV
Protective extra low voltage
P
m
Frequency converter nominal output power as
high overload (HO).
P
M,N
Nominal motor power
PM motor
Permanent magnet motor
Process PID
PID (Proportional Integrated Differential) regulator
that maintains the speed, pressure, temperature,
and so on.
R
br,nom
Nominal resistor value that ensures a brake power
on the motor shaft of 150/160% for 1 minute
RCD
Residual current device
Regen
Regenerative terminals
R
min
Minimum permissible brake resistor value by
frequency converter
RMS
Root mean square
RPM
Revolutions per minute
R
rec
Recommended brake resistor resistance of
Danfoss brake resistors
s
Second
SFAVM
Stator flux-oriented asynchronous vector
modulation
STW
Status word
SMPS
Switch mode power supply
THD
Total harmonic distortion
T
LIM
Torque limit
TTL
TTL encoder (5 V) pulses - transistor transistor
logic
U
M,N
Nominal motor voltage
V
Volts
VT
Variable torque
VVC
+
Voltage vector control plus
Table 1.1 Abbreviations
Introduction
VLT
®
Refrigeration Drive FC 103
8
Danfoss A/S © 08/2015 All rights reserved.
MG16G202
1
1







































































