













Cortex Microcontroller and VEXnet Joystick User Guide
Page 7 of 14
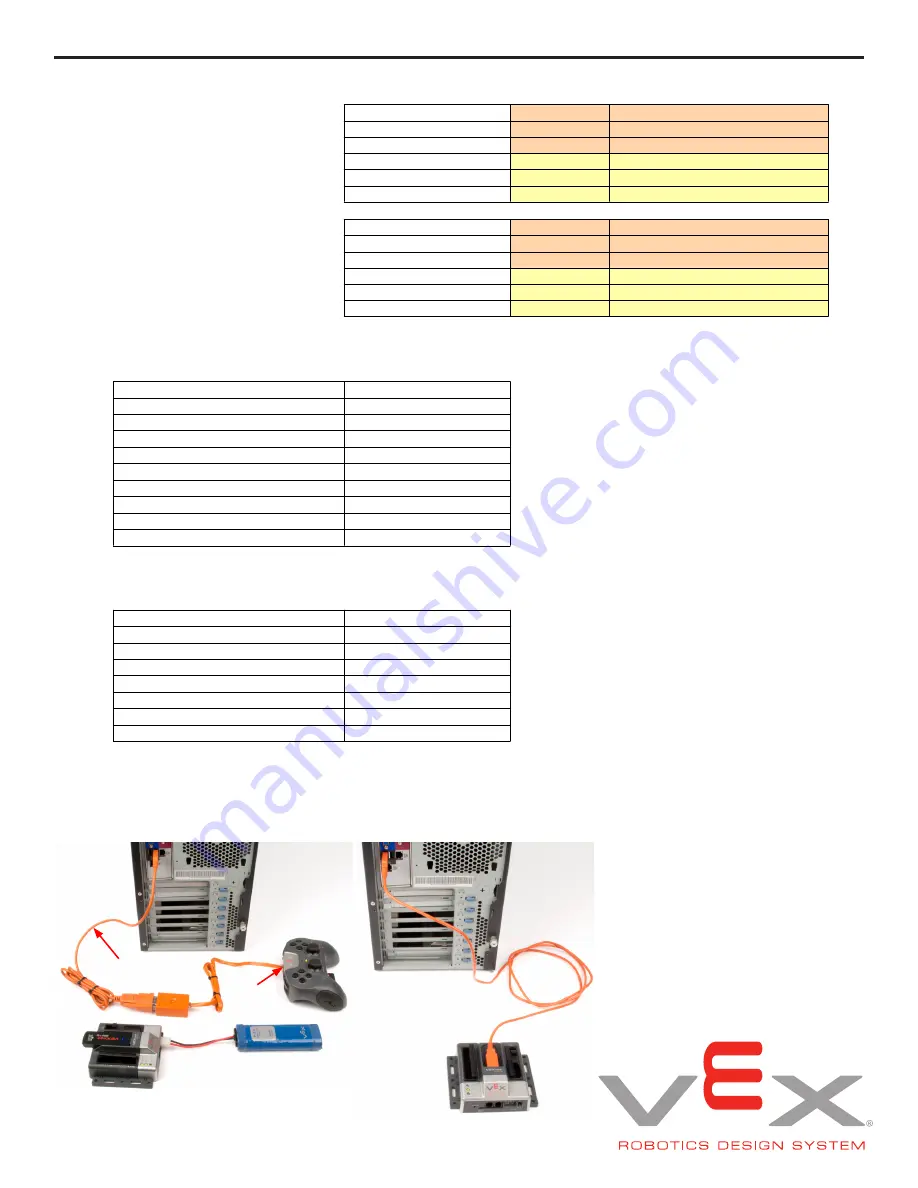
a. The Cortex may be reprogrammed with user-created code. The hardware setup for wireless downloading is shown
below. For non-wireless downloading, the VEXnet keys may be substituted with a USB A-A cable. You can also
download code directly to the Cortex using the USB A-A cable.
Arcade Mode - Channel 1 (right stick, X-axis) + Channel 2 (right stick, Y-axis)
Arcade Mode - Channel 1 (right stick, X-axis) + Channel 2 (right stick, Y-axis)
Arcade Mode - Channel 1 (right stick, X-axis) + Channel 2 (right stick, Y-axis)
Channel 1 (right stick, X-axis)
Motor 1
LEFT DRIVE
Joystick Right = Motor CW
Robot Turn Rate
Motor 2
LEFT DRIVE
Joystick Right = Motor CW
Motor 3
LEFT DRIVE
Joystick Right = Motor CW
Motor 4
RIGHT DRIVE
Joystick Right = Motor CW
Motor 5
RIGHT DRIVE
Joystick Right = Motor CW
Motor 10
RIGHT DRIVE
Joystick Right = Motor CW
Channel 2 (right stick, Y-axis)
Motor 1
LEFT DRIVE
Joystick Up = Motor CW
Robot Forward Speed
Motor 2
LEFT DRIVE
Joystick Up = Motor CW
Motor 3
LEFT DRIVE
Joystick Up = Motor CW
Motor 4
RIGHT DRIVE
Joystick Up = Motor CCW
Motor 5
RIGHT DRIVE
Joystick Up = Motor CCW
Motor 10
RIGHT DRIVE
Joystick Up = Motor CCW
Reverse Motor Direction
Reverse Motor 1
Jumper in Digital 1
Reverse Motor 2
Jumper in Digital 2
Reverse Motor 3
Jumper in Digital 3
Reverse Motor 4
Jumper in Digital 4
Reverse Motor 5
Jumper in Digital 5
Reverse Motor 6
Jumper in Digital 6
Reverse Motor 7
Jumper in Digital 7
Reverse Motor 8
Jumper in Digital 8
Reverse Motor 9
Jumper in Digital 9
Reverse Motor 10
Jumper in Digital 10
Limit Switch Inputs
Motor 6 ignores CCW
Jumper in Analog 1
Motor 6 ignores CW
Jumper in Analog 2
Motor 7 ignores CCW
Jumper in Analog 3
Motor 7 ignores CW
Jumper in Analog 4
Motor 8 ignores CCW
Jumper in Analog 5
Motor 8 ignores CW
Jumper in Analog 6
Motor 9 ignores CCW
Jumper in Analog 7
Motor 9 ignores CW
Jumper in Analog 8
276-2186
Programming Cable
Program
Port
Cortex
Microcontroller
Cortex
Microcontroller
VEXnet
Joystick
PC
PC
USB Port
USB Port







































































