



















CCM12 CANbus
User Manual
5
9M02-7717-A001-EN
Version 3.0
1.
Functional Overview
The Cattron CANbus compact MCU (CCM12) is a radio remote control receiver with CANbus interfaces. It is
designed to be used with the Cattron OCU (Operator Control Unit) product line.
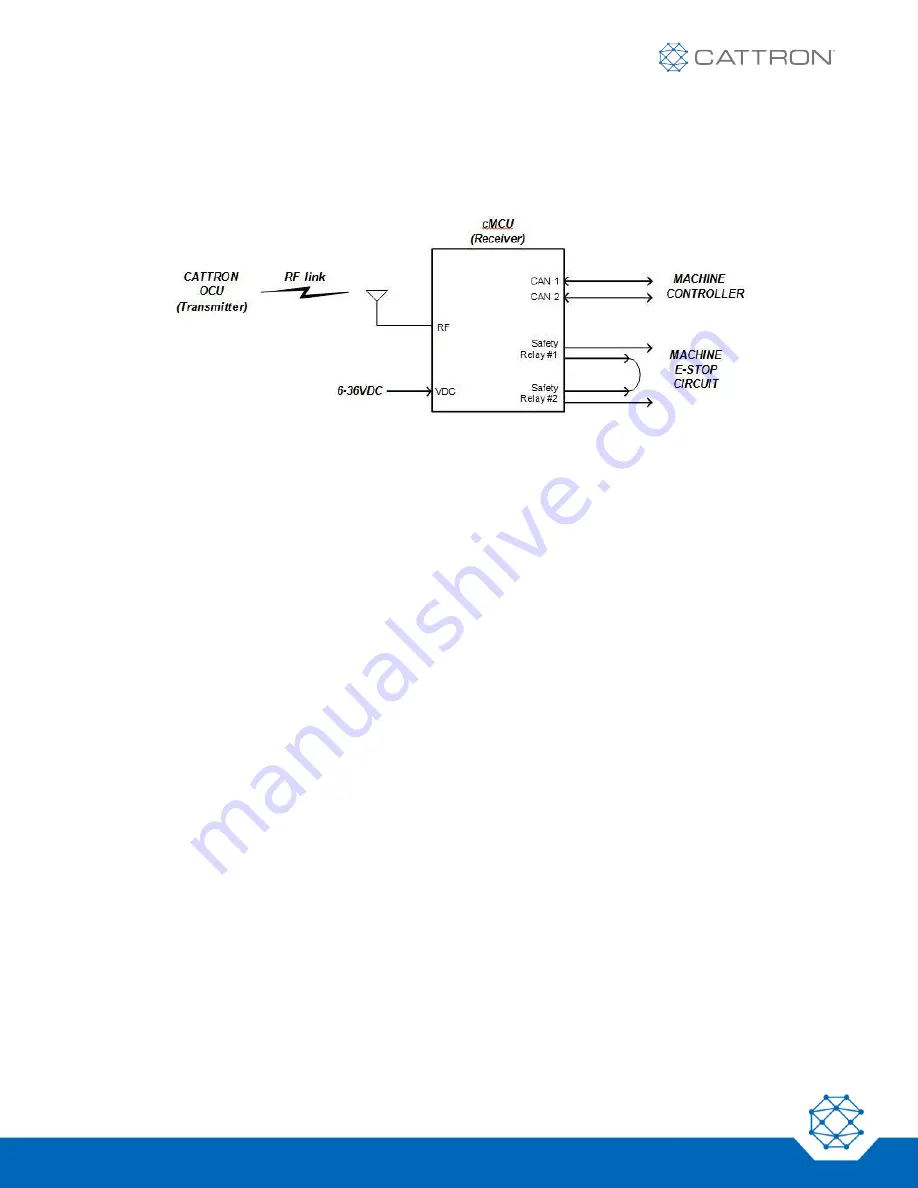
Figure 1: CattronControl CANbus CCM12 typical application
In most applications, the two redundant safety relays are connected in series as shown.
1.1
Features
Several important features of the CCM12 are described here.
•
CANbus interface
–
The CCM12 CANbus interfaces meet the ISO11898-2 standard. Both interfaces are
electrically isolated. Higher level protocols such as CANopen and J1939 are supported.
•
Dual safety relays
outputs
–
The CCM12 provides two monitored safety relays (forcibly guided contact
relays, according to EN50205). The normally-opened contacts close when a valid RF link is present
between the OCU and the CCM12, and both units operate without error. The safety relays are used as
STOP devices independent of the CANbus link.
•
RF Communication
–
The CCM12 supports two-way RF communication with the OCU, providing
feedback capability for sending information to the OCU display. RF transmission is protected against
noise and corruption with mechanisms as CRC, sequencing control, etc.
The CCM12 is compatible with several Cattron RF modules, each one supporting a particular frequency
band. It can be configured to operate on a specific RF channel, or to scan among the available channels
(auto-scan mode).
•
TransKey Configuration Device
–
System configuration is done using a removable, contact-less RFID
memory device, the TransKey. TransKeys are produced in pairs (one for the OCU and one for the MCU).
Each pair has a unique 24-bit ID. RF links can only be established between an OCU and MCU sharing
the same TransKey ID.
The TransKeys are also used to store configuration parameters, such as RF channel, link time-out delay,
etc. To be programmed, the TransKey has to be removed from the unit and programmed using a PC with
the proper programming hardware and software.
The TransKey cannot be removed during operation; if removed, the unit enters Error mode within a few
seconds.
•
Dual Processor Redundant Architecture for Safety (EN13849)
–
In order to meet the EN13849
requirements for safety-relevant applications, the system design is based on a dual channel redundant
architecture. Two processors running in parallel perform similar operations on the process data, and
compare their results at specific check points for consistency. In addition, active fault detection is
performed at run-time by each processor. In the case of inconsistency or fault detection, the device enters
Error mode.
Summary of Contents for CattronControl CCM12
Page 1: ...CCM12 CANbus User Manual ...







































































