





















BML SL1-ALZ _-_ _ ZZ- _ _ _ _ - _ _ _ _
Absolute Magnetically Coded Position Measuring System
Construction and function (continued)
english
www.balluff.com
2
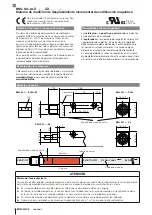
–Roll
+Roll
–Pitch
+Pitch
Z
Linear application
Working range 1
1)
Working range 2
1)
Function range
1)
Mechanical tolerances
Z
(gap between sensor/magnetic tape)
≤ 0,4 mm
≤ 1,0 mm
≤ 1,3 mm
Z
(gap between sensor/magnetic tape
with cover strip)
≤ 0,25 mm
≤ 0,85 mm
≤ 1,15 mm
Y
(side offset)
±0,5 mm
±1,0 mm
±1,5 mm
Pitch
±0,5°
Yaw
±0,2°
Roll
±0,5°
Measuring accuracy
Max. non-linearity of entire system
(sensor head + magnetic tape)
±15 µm
±40 µm
±100 µm
Non-linearity of sensor head
±5 µm
±30 µm
±40 µm
Hysteresis
≤ 1 µm
≤ 2 µm
≤ 2 µm
Repeat accuracy
≤ 1 µm
≤ 2 µm
≤ 2 µm
1) The different mounting tolerances must be met depending on the required measuring accuracy.
Freibereich magnetisierbarer
Materialien
Verfahrrichtung
Vorwärts, A (Sin) vor B (Cos).
Aktive Messfläche
5
5
Z
X
Z
Tangential point
–Pitch
+Pitch
Curved application
Diameter
2000 mm
1000 mm
400 mm
Mechanical tolerances
Z
(gap between sensor/magnetic
tape)
≤ 1,0 mm
≤ 0,6 mm
≤ 0,1 mm
Z
(gap between sensor/magnetic
tape with cover strip)
0,85 mm
0,45 mm
–
Y
(side offset)
±0,5 mm
X
(tangential offset)
32,5 mm ±1 mm
Pitch
±0,5°
Yaw
±1°
Roll
±0,5°
Linear application
Curved application
+Yaw
–Yaw
Y
27.3