





























Autopilot Installation Manual
5.2
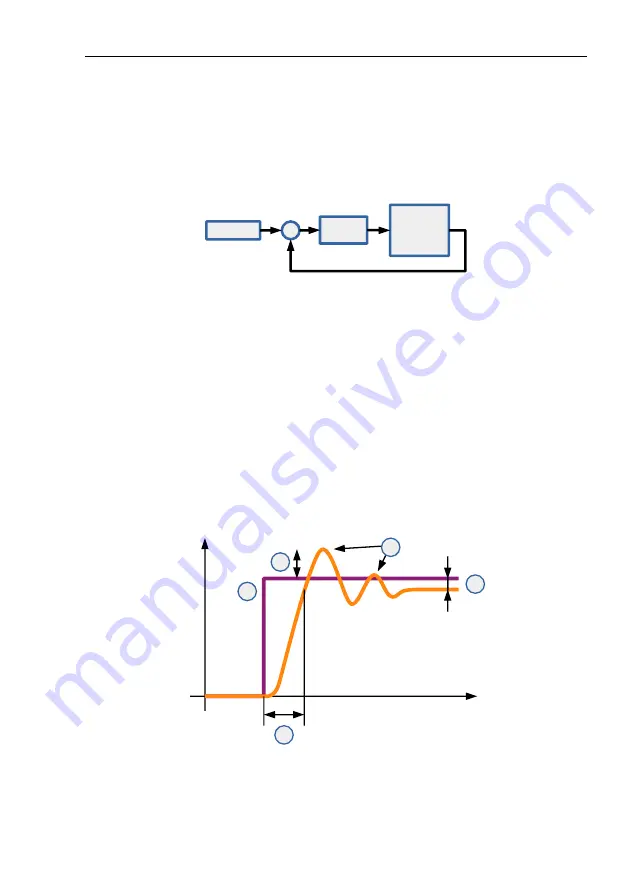
Step Change and Response
Typical block representation of the controller with feedback is shown on fig-
ure 13. The input to
PID
controller is the difference between reference and
measured process value. Output of the controller must control the process to
reduce the difference. Controller performance depends heavily on the accu-
racy of the sensed process variable and the precision of the actuator.
PID
controller
Aircraft
(Process)
+
Reference
-
Process variable
Figure 13:
Typical PID controller block diagram.
If you are interested in PID controller, a good start may be the Wikipedia
article,
https://en.wikipedia.org/wiki/PID_controller
5.2
Step Change and Response
Controller tuning is an iterative process. The operator triggers a step change
of the reference value for each loop observing the aircraft response. Based on
the aircraft response the terms of the controller are modified to get optimal
ones. Analysis of response needs few technical terms which are explained with
a figure 14:
Time
V
a
ria
bl
e
1
2
3
4
5
Figure 14:
Step response of closed loop system.
1. Reference step change.
27
©
Kanardia
2016-2020





















































