



























2.2.3 Installation of additional proximity sensors (rear)
The sensors have a pitch of 1.27mm - half as much as usual. Therefore you should have a soldering iron with
a fine tip and a power of approx. 50 W power.
Pay attention to the vertical position of the sensors and do not make them stand out. It is recommended to
first solder only one pin, then align the sensor and then solder all other pins.
Hint:
After installing the new sensors you have to configure the Robot accordingly.
The details about the configuration you can find under section 3.8!
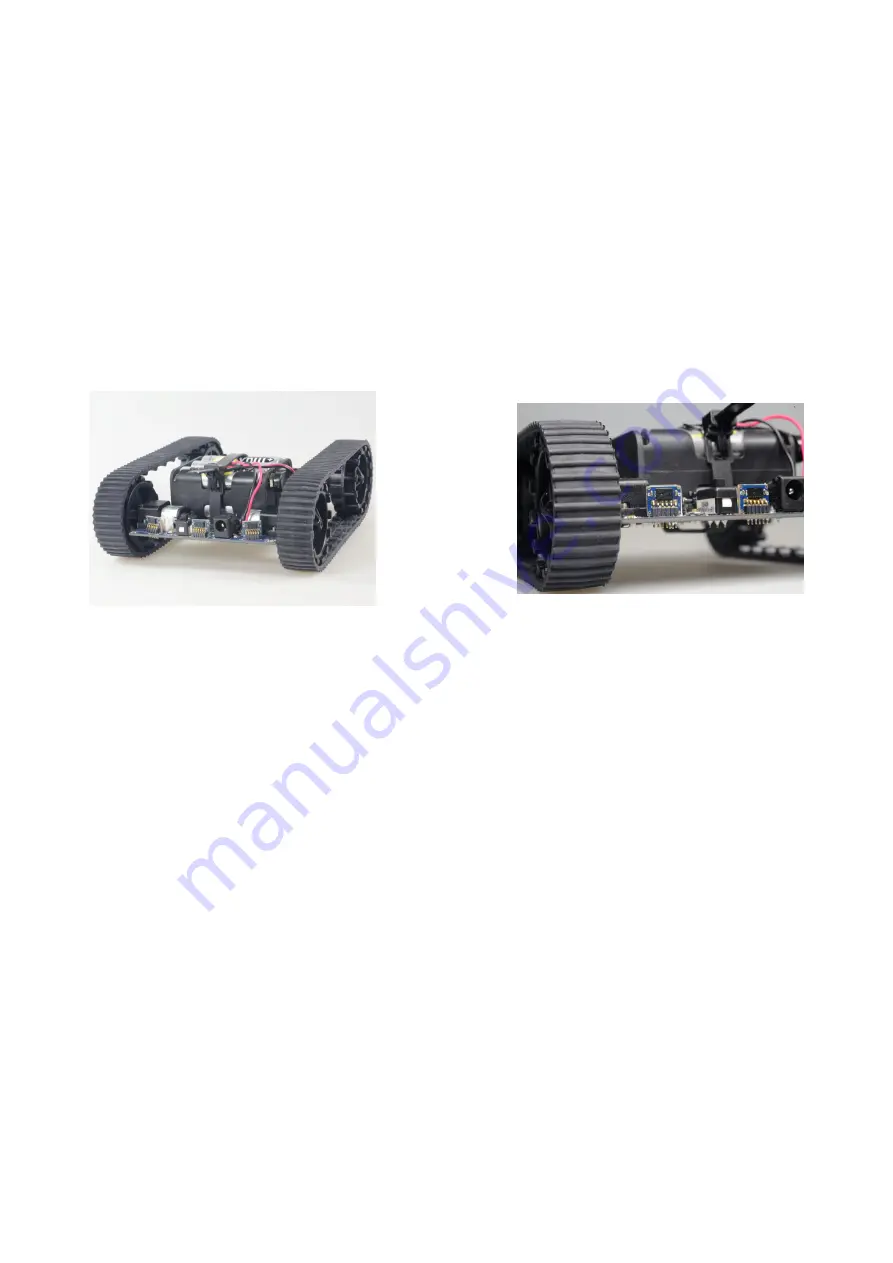
Figure 2.3
Marvin with rear proximity sensors
Hint:
It is best to exercise soldering on a PCB before - be economical with the solder. Too
much solder can cause shorts between the PINs!
AREXX Engineering & JM³ Engineering
Version: 1.3.1
October 27, 2017
Page: 7






































































