
















Temposonics
®
MH Digital
Operating Manual
I
21
I
SAE J1939
The SAE J1939 sensor operating parameters can be set analogously to the CANopen sensor. The sensor can receive configuration messages
during operation and saves the settings immediately after receiving the message. The following operating parameters are configurable:
Cycle Time (Transmission Repetition Rates)
The transmission Repetition Rate (Update Rate) is the interval at which a new position value is available at the sensor output. Depending on ap-
plication and bus load due to other bus sharing units, it is recommendable to set the cycle time. The value is within a range of 0 - 65635 ms.
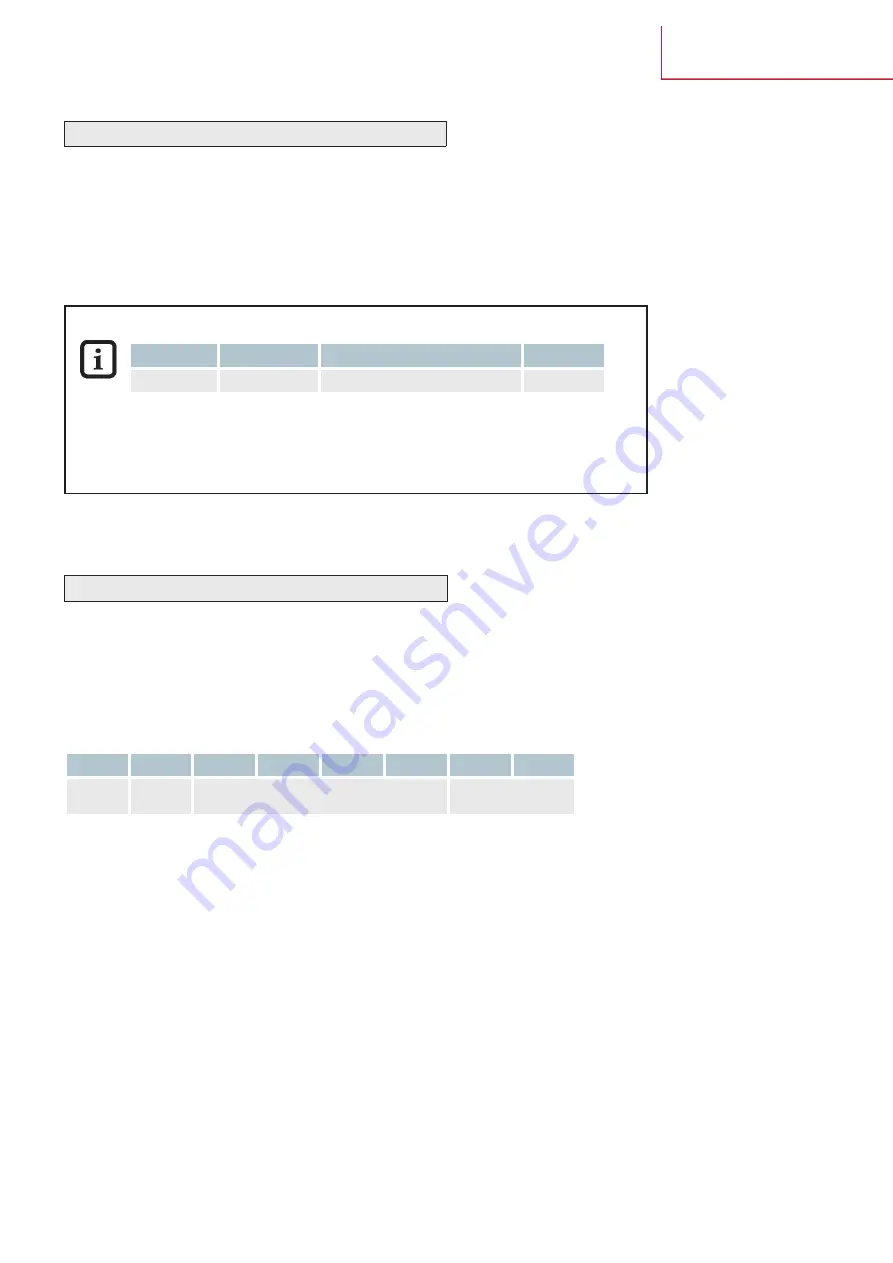
Set the cycle time with following commands (e.g. 100*)
Data source
COB-ID
Data
Destination
Controller
0x18B2
SAMA
4D; 54; 53; 00; 64*; 00*; 00; 00
Sensor
SA – MH CAN J1939 standard sensor Source Address
MA – Master Source Address
*z.B. 64; 00: Bytes to configure transmission repetition rates
10.4 Sensor data during operation
CANopen & CANopen Safety
For data output, the Temposonics
®
MH series position sensor provides a process data object (PDO). The PDO includes the data for position and
speed.
Data Format
The position data resolution is fixed to 100 µm and the resolution of speed data is 1mm/s. However, the adjusted values can be read out also
under index 6005 of the object directory. Design is always as a 32-bit integer value for position data and as a 16 bit integer value for speed data.
Identifier
DLC
D0
D1
D2
D3
D4
D5
180h +
NodeID
6
Position
Magnet 1
Speed
Magnet 1
Fig. PDO allocation when using the default settings
The position and speed are calculated using the following formula:
Position [µm] = position value [counts] * 100µm
Speed [mm/s] = speed value [counts] * 1 mm/s
J1939