





























Quick Start
20
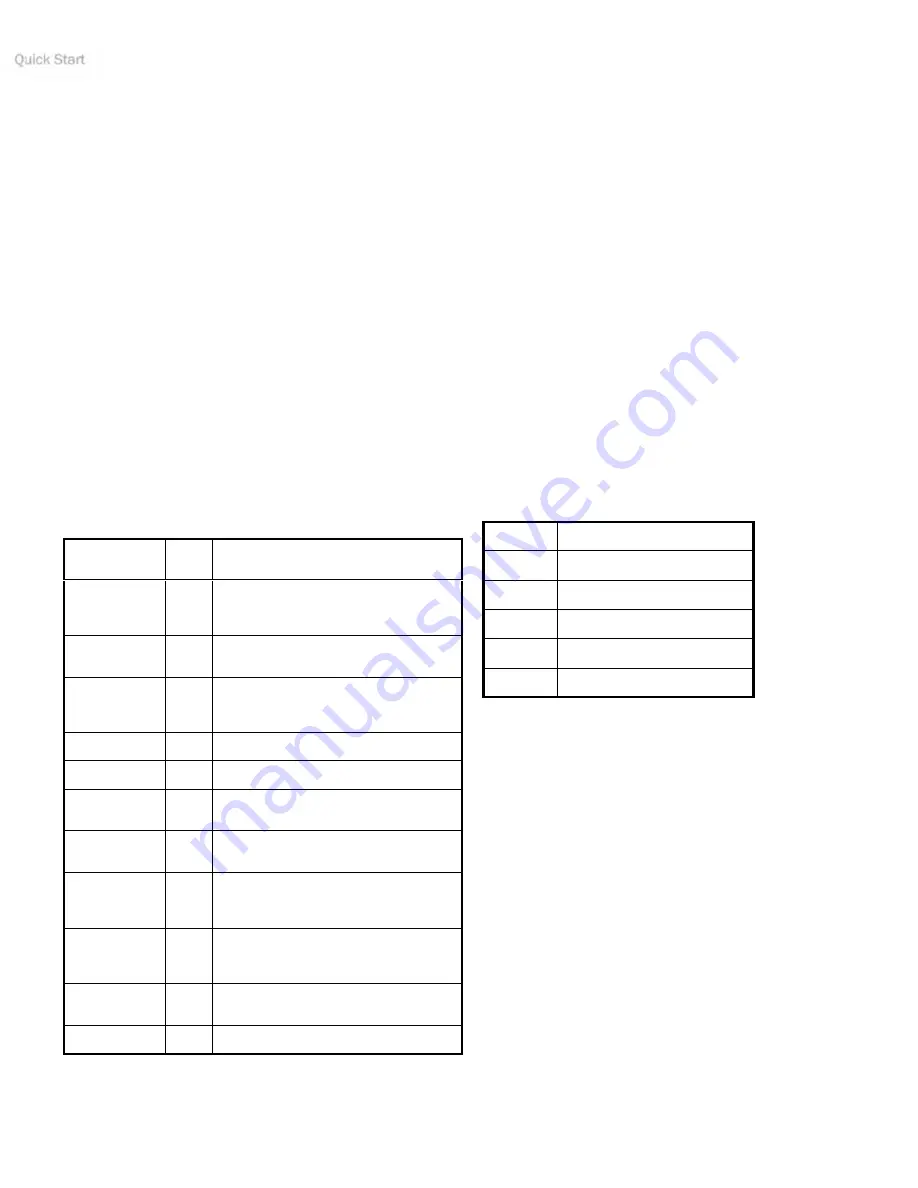
Table 2. Keyboard teleoperation
KEY
ACTION
↑
forward
↓
reverse
←
turn left
→
turn right
space
all stop
Table 3. ARIA demo operation modes
MODE
HOT
K
EY
DESCRIPTION
laser
l
Displays
the
closest
and
furthest readings from the laser
range finder
io
i
Displays the digital and analog-
to-digital I/O ports
position
p
Displays the coordinates of the
robot’s position relative to its
starting location
bumps
b
Displays bumpers status
SONAR
s
Displays the SONAR readings
camera
c
Controls and exercises the pan-
tilt-zoom robotic camera
gripper
g
Controls, exercises and displays
status of the Gripper accessory
wander
w
Sends the robot to move around
at its own whim while avoiding
obstacles
teleop
t
Drive and steer the robot via
the keyboard or a joystick;
avoids collisions
unguarded
u
Same
as
teleop,
except
no
collision avoidance
direct
d
Direct command mode
A Successful Connection
ARIA prints out lots of diagnostic text as it negotiates a connection with the robot. If successful, the client requests
various ARCOS servers to start their activities, including SONAR polling, position integration and so on. The
microcontroller sounds an audible connection cue and you should hear the robot’s SONAR ping with a distinctive and
repetitive clicking. In addition, the motors-associated
STATUS
LED on the User Control Panel should flash very fast (was
flashing slowly while awaiting connection). Note that the ARIA demo automatically engages your robot’s motors though
a special client command. Normally, the motors are disengaged when first connecting.
The amber
SERIAL
port indicator LEDs on the robot’s User Control Panel should blink to indicate ARIA-client to ARCOS-
server communications, too.
O
PERATING THE
ARIA
D
EMONSTRATION
C
LIENT
When connected with the ARIA demo client, your robot becomes responsive and intelligent. For example, it moves
cautiously. Although it may drive toward an obstacle, your robot will not crash because the ARIA demo includes
obstacle-avoidance behaviors which enable the robot to detect and actively avoid collisions.
The ARIA demo displays a menu of robot operation options. The default mode of operation is
teleop
. In
teleop
mode, you drive the robot manually, using the arrow keys on your keyboard or a joystick connected to the client PC’s
joystick port (as opposed to a joystick port on the robot).
While driving from the keyboard, hold down the
respective keys to simultaneously drive the robot
forward or backward and turn right or left. For
instance, hold down the up-arrow key to have the
robot accelerate forward to its cruising speed of
around 400 millimeters per second (defined in the
source code). Release the arrow key to have the
robot slow down and stop. Press and hold the
right- or left-arrow key to have the robot rotate or
turn in an arc if you also hold down the up- or
down-arrow key.
The other modes of ARIA demo operation give you
access to your robot’s various sensors and
accessories, including encoders, SONAR, laser,
Gripper, a pan-tilt-zoom robotic camera, I/O port
states, bumpers and more. Accor-dingly, use the
ARIA demo not only as a demonstration tool, but as
a
diagnostic one, as well, if you suspect a sensor or
effector has failed or is working poorly. The demo
also is useful for calibrating your robot’s drive







































































