





























www.adeept.com
39
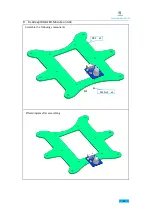
E. Take component C2 and component D2 and connect the servo to Adeept 32 Channel PWM
Drive.
Servo wiring diagram
At this time, the servo and Adeept 32 Channel PWM
Drive have been installed. For convenience of reading,
only the wiring of the steering gear and Adeept 32
Channel PWM Drive are shown here.
Connect the servo wiring on the
components of C2 and D2 to
port PWM15, PWM14, and
PWM13 respectively, connect
the 3 steering gear with 3 ports
at will, but the color of the
steering gear line need to
correspond with the color of the
port, so as not to burn out the
servo.
When the servo is connected to the Adeept 32 Channel PWM Drive, turn the switch on the
Adeept 32 Channel PWM Drive to ON (turn ON the power), wait for the steering gear to
turn to the initial position, and then continue the next step.
Summary of Contents for Hexapod 6 Legs Spider Robot
Page 1: ...www adeept com 1...
Page 40: ...www adeept com 36 The effect diagram after the assembly of three right feet...
Page 49: ...www adeept com 45 The effect diagram after the assembly of three left feet...
Page 63: ...www adeept com 59 C Connect Adeept Ultrasonic Module with Adeept 32 Channel PWM Drive...
Page 64: ...www adeept com 60 D Connect Adeept RGB LED Module with Adeept 32 Channel PWM Drive...
Page 65: ...www adeept com 61 E Connect Adeept Passive Buzzer Module with Adeept 32 Channel PWM Drive...
Page 66: ...www adeept com 62 F Connect 18650x2 Battery Holder with Adeept 32 Channel PWM Drive...
Page 67: ...www adeept com 63 G Connect 18650x2 Battery Holder with Adeept Remote Control Shield...
Page 75: ...www adeept com 71...
Page 77: ...www adeept com 73...
Page 79: ...www adeept com 75 Click the button to upload the sketch to the board...
Page 83: ...www adeept com 79...





















































