






4
FUZZY SMM
possède le deuxième mode d'opération (le mode II), dans ce mode d'opération,
l'éruption de matraque d'impôt agit directement sur la toupie, celui-ci conduit alors le gouvernail ou
modèle sans effet assourdissant après l'avantage de la matraque d'impôt et tient avec cela la vitesse
de rotation fixée à l'avance proportionnellement à l'éruption de matraque constante.
Des mouvements d'impôt du pilote mènent aussi vers des mouvements d'idée, donc, un mixer interne
s'occupe de ce que les mouvements d'idée conduits ne sont pas compensés par le pilote.
Mode I, Normale
Le mode d'opération comme toutes les toupies jusqu'à présent, travaille avec le haut amortissement
sur le gouvernail respectif, mis, par exemple, sur l'aileron si lors du départ ou à l'atterrissage, dans
l'excursion droite ou au cercle d'ascendance thermique,
à FUZZY SMM
le modèle arrête
régulièrement, aucune rafale ne peut déranger plus la répartition de pays, aucune ascendance
thermique encore ne peut jeter le modèle du train. Pour des vols d'ascendance thermique,
FUZZY
SMM
par émetteur est coupé à la recherche dès que la "barbe" est trouvée,
FUZZY SMM
activent et
dès ça va en haut au centre de la barbe, tombent de façon (presque) impossible lors de l'emploi juste.
A remorqué nécessaire aussi pour la machine de moteur,
FUZZY SMM
deux modèles arrête
absolument justement et n'admet plus aucun mouvement brusque sur l’axe. Aussi sur le gouvernail de
hauteurs les avantages connus ne résultent pas, par exemple, aucun modèle ne saute plus à
l'atterrissage, dans la voltige, le modèle s'enclenche en règle. Par ces qualités
monte la performance
du modèle, car la résistance de modèle, provoquée par des éruptions d'impôt des gouvernaux devient
en tout par le pilote, moindre.
Mode II, Heading
Nouveau mode d'opération, recommandé pour tous les modèles avec des problèmes lors du départ,
par exemple, sur le gouvernail de côtés. Avec cela une évasion du modèle non seulement est
empêchée, le cours est respecté dans chaque cas. Avec Heading la fonction (engl. Le cours tiennent)
le modèle devient dans sa direction. Celui-ci convient aussi pour tous les autres gouvernaux, doit être
essayé cependant dans le cas isolé. L'éruption de matraque provoque une rotation du modèle autour
de l'axe stabilisé, la vitesse de rotation est toujours proportionnelle à l'éruption de matraque. La
matraque conduit la vitesse de rotation du modèle, non plus une direction.
Possibilités de réglage
DIP de 4 pôle le commutateur sert à l'embauche des paramètres :
ON OFF
1
Sortie 1, la direction de Servo
NORMALEMENT
Sortie 1, la direction de servo REVERSE
2
HEADING Mode
Mode NORMALE
3
Assortiment Servo la limite Utilisage
NORMALE
4
Sortie 2, la direction de Servo
NORMALEMENT
Sortie 2, la direction de servo REVERSE
Enclencher:
après la mise sous courant du récepteur/gyroe,
le modèle ne remuent pas jusqu'à LED
brille ou lui-même Servos font conduire
. Pour Enclencher irréprochables que 80% de sensibilité ne
règle plus, autrement celui-ci n'est pas fini, LED ne brille pas. A utiliser plus tardive, la sensibilité
jusqu'à 100% peut être réglée.
Chacun changent de DIP-Switches un changement de vitesse de le gyro est seulement après
avoir éteint et encore efficace. Devant une nouvelle mise sous courant seulement environ 20-30
sec. Des points de vue, seulement les nouvelles positions de commutateur sont efficaces alors
(l'installation de sécurité l'interruption de tension doit être esquivée).
LE DIP 1/4 - NORMALEMENT / DES REVERS
Reverse la direction de compensation de servo respectif autour de.
La position du commutateur DIP
devient memoirise seulement à la mise sous courant, déguisement plus tardif est sans
fonction
.
LE DIP 2 – NORMALEMENT, NORMALEMENT / HEADING
Avec ce DIP-Switch peut être choisi si le gyro fait le mode ou éligible entre le mode de Heading et
Normalement (s.u.) exclusivement dans (l'étouffeur) Normalement.
Dans la position ON du commutateur DIP 2 sont à la disposition le mode d'opération normal (le mode
I) et aussi le mode d'opération HEADING (le mode II). Entre les deux modes peut être choisi avec le
canal de Gain. Le mode d'action du canal GAIN est tellement changé que le minimum de sensibilité se
trouve pour les deux modes au centre d'un canal libre. Les valeurs plus grandes sur un côté
provoquent une stimulation de la fonction HEADING (le MODE II), au maximum de canal, 100% est
atteint. Du centre à l'autre côté, le mode de gyro normal (le MODE I) dans la sensibilité est conduit. Au
contrôle pour le mode d'opération, la fréquence optique change LED.
Le DIP 3 - l'assortiment des limites de servo
Si ce commutateur se trouve pendant enclencher de le gyro dans la position ON, l'assortiment des
limites de servo (LED part brille continuellement). Dans l'émetteur, aucune réduction de chemin ou
différenciation ne devait être programmée. Maintenant,
l'assortiment des limites de servo
mécaniquement possible au gouvernail à stabiliser est transporté avec la matraque d'impôt
respective après les deux côtés. Avec cela le chemin mécanique devait être grand de la même
façon après les deux côtés, avec le Servo ou le système de tiges d'impôt ne peut courir à
aucune affiche mécanique. La position maxima atteinte de la matraque est mémorisée après un
côté. Avec cela, le chemin de Servo conduit par le gyro, non chemin de Servo qui est conduit à
l'émetteur est réglé.
Si est le chemin est formé, des commutateurs DIP dans la position OFF apportent, avec cela le chemin
est mémorisé. Après abattent du commutateur DIP dans la position OFF Servo remue au contrôle
après à droite - le centre - à gauche. Maintenant, ce chemin correspond au chemin que Servo
exportera à la pleine éruption de correction après chaque côté, Limiter incorporé empêche alors que
Servo se mette en marche mécaniquement. Des gyro (récepteurs) éteignent, allument encore, le gyro
se trouve encore à l'entreprise normale.
La position du commutateur DIP devient seulement à la
mise sous courant, déguisement plus tardif est sans fonction
. Avec cette fonction, seulement les
petites corrections la maniere de servo devaient se produire autant que possible (+/-10%), la qualité
du réglage pourrait être influencé par ailleurs négatif.
1, le soutier de dynamique
Base pour l'embauche de dynamique :
Le but à la mouche avec des gyro est voler avec la
sensibilité de gyro possible au maximum. Alors le soutien de gyro optimal est atteint à la précision
d'impôt le plus grandement possible. Si la sensibilité est augmentée, devient se le modèle dès un point
déterminé osciller, une augmentation supplémentaire de la sensibilité accélère osciller. Le point auquel
osciller commence, est très fort des facteurs mécaniques dans le modèle dépendant comme par
exemple la force de Servos, la reproductivité Servo positiones et, avant tout, de la vitesse de Servos
utilisé. Maintenant, le régulateur de dynamique permet de régler le gyro dans à peu près sur les
réalités mécaniques disponibles. Si le régulateur du centre sur le côté défavorable est tordu, le modèle
s'élance encore plus fort sur. Si on tourne le régulateur au côté juste (dépendant des réalités
mécaniques), maintenant on peut ouvrir plus loin la sensibilité et améliorer encore une fois avec cela le
résultat de gyro. Rotation à gauche = plus confortablement, la rotation à droite = plus dur.
Une embauche neutre existe (NORMALEMENT) dans la position de moyen à l'entreprise de gyro dans
le MODE I, à gauche "rotation" est plus mou, à droite plus dur. Osciller du modèle, des soutiers en
direction de confortablement tournent.
Dans le mode II, (HEADING), le soutier influence vitesse de compensation et la précision d'appui de
position de confortablement jusqu'à dur.
2, Fade out
Avec le poti 2 peut être réglé à quel point de l'éruption de matraque l'effet de le gyro est coupé.
L'embauche peut être choisie entre 20% et 100% du chemin de matraque.
L'effet de poti se produit toujours un peu de manière retardée, donc au test après le déguisement se
produit attendent quelque chose.
Moniteur LED
Après le process de enclencher :
Aucun scintillement sensibilite=0, gyro coupé
X-X-X
Gain le canal pas couvert, on. Gain activement
XX-XX-XX
l
opération mode 1, Normalement, tout O.K.
XXX-XXX-XXX
opération mode II, Heading, tout O.K.
Si le LED brille 4 ou 5 fois vite, le gyro ne peut pas être faite. Dans ce cas, un changement non
pouvant être rétabli du détecteur de Piezo existe, il fut par la vibration, le vieillissement etc.
une
routine de sécurité
à la mise sous courant s'occupe alors de ce que le gyro ne va pas à utilisage.
Ainsi, une perte est empêchée à cause des changements d'élément dans le vol = la haute sécurité.
Le gyro reconnaît naturellement
aussi du pilote aux rotations conduites autour de l'axe stabilisé. C'est
pourquoi, il essaierait de compenser aussi ces mouvements d'idée qui changerait complètement le
sentiment d'impôt pour le modèle.
FUZZY SMM
est fermé en fondu dans ce cas
par un disparaître incorporé
de la matraque. A l'un
entre 20% et 100% d'éruption de matraque réglable (Poti 2) après un côté, l'effet
de FUZZY SMM
à
100% est réprimé.
Ajustement de sensibilité par l'émetteur
FUZZY SMM
pendant l'utilisage ou tourné le commutateur par dès ou continu peut être réglé par le
canal supplémentaire dans la sensibilité entre 0% et 100%.
Ainsi
FUZZY SMM
à la recherche de l'ascendance thermique peut être coupé car
avec FUZZY
allumé
par
, l'ascendance thermique ne peut être reconnue peut-être au comportement de modèle.
Le gyro de surfaces traditionnelles en face de loin la sensibilité augmentée s'occupe aussi de la
stabilisation suffisante pour des modèles avec la grande envergure ou haute masse.
Aux modèles plus petits, le réglage de sensibilité peut être difficile ainsi, donc, peut-être un peu parce
que la sensibilité possible au maximum est déjà atteinte après relativement petit chemin de canal a
l’emmeteur. Dans ce cas, la réduction de chemin aide alors dans l'émetteur. Simplement pour le canal
de sensibilité programment une réduction de chemin, ainsi l'effet est écarté, et la sensibilité peut être
réglée plus avec sentimentalité.
Ajustement de sensibilité manuelle,
le fait de savoir du "manque de canal" le réglage de sensibilité
(canal de Gain) au récepteur ne deviennent pas, la sensibilité peut aussi être réglée à Poti (Poti 1).
Boîtier
Par la manière de construction basse, petite grandeur de boîtier et le petit poids peut être mis par de
FUZZY SMM
aussi dans les petits modèles.
Installation
le détecteur de le gyro doit être incorporé tellement que l'axe de gyro et l'axe à stabiliser souhaité du
modèle (l’axe aileron, l’axe profondeur, l’axe derive.) sont identiques. L'axe de détecteur court d'en
haut par le boîtier de détecteur. C'est pourquoi, le montage dans le modèle doit se produire tellement
que le sol du boîtier de détecteur exactement 90 degrés est monté à l'axe voulu. Nous recommandons
la fixation du détecteur avec le ruban adhésif double ci-joint. Le détecteur de gyro avec le sol de boîtier
sur le lieu prévu dans le modèle collent.
L'expérience montre que le détecteur de gyro devait être monté autant que possible à un lieu du
modèle très loin des moteurs, puisque l'élément de détecteur lui-même mesure des vibrations de
moteur comme le mouvement et transmet à Servo et renforce, cela mènerait vers le Servos
considérable. Un lieu stable dans le modèle est le mieux tant que celui-ci ne se déforme pas ou oscille.
Servo utilisé est dirigé très fréquemment par la haute résolution du détecteur qui peut mener plus haut.
Le résultat de gyro le meilleur est obtenu naturellement avec Servos rapides.
Le boîtier d'électronique de le gyro peut être incorporé à un lieu convenable dans la mécanique. Font
attention aussi ici au stockage libre de vibration, emballent Meilleur dans le caoutchouc d'écume.
Correspondance
Des prises en courant et le coussinet de le gyro correspondent à System JR/Futaba. Il doit être estimé
purement à ce que les côtés d'impulsion des prises en courant soient aussi mis au récepteur
proportionnellement, aussi Servostecker dans le coussinet de la toupie. Au ne naît aucun défaut,
purement aucune entreprise des prises en courant et des coussinets (s ne se met. Image).
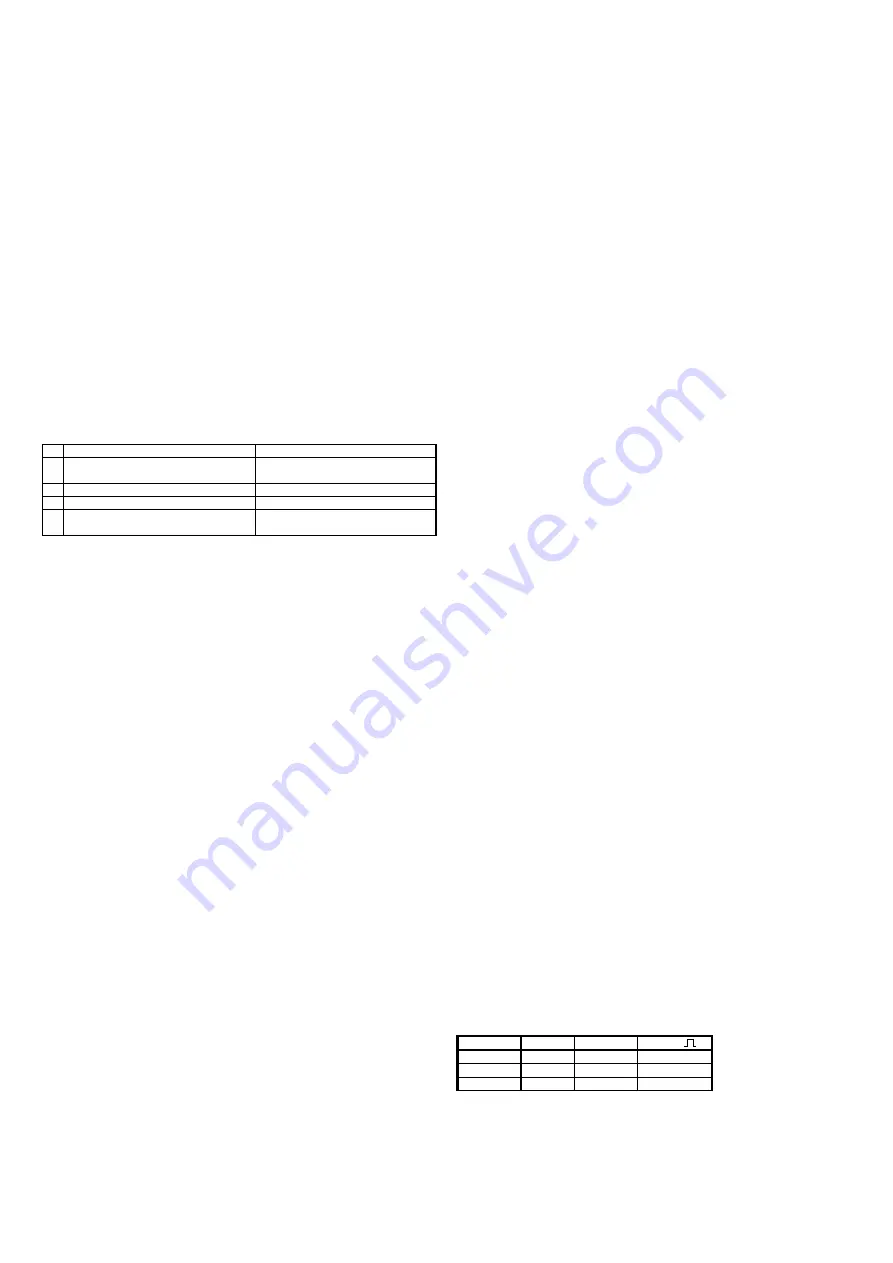
Couleurs de câble Stecksysteme :
Système
Plus (+)
Moins (-)
Impulsion
Graupner rouge Brun
orange
Futaba rouge Noir sait
MPX
rouge
Noir
jaune
D'abord on recommande d'entreprendre toutes les correspondances pour l'axe/fonction stabilisé
sans
FUZZY SMM
et des émetteurs et le Servo tellement règlent que toutes les fonctions travaillent juste de
sens (échappe au modèle déjà volé).
Alors
FUZZY SMM
succédent. entre Servo disponibles de l'axe à stabiliser et le récepteur. En plus
Servo pour l'axe stabilise rendre au récepteur se retirent et se trouvent sur 1
de FUZZY pro
. L'Impulse
de Servo (Futaba sait, JR orange, MPX jaune) toujours de même que le câble initial se directement
trouvant en bas. Servo 1 (se trouve lors de la livraison dans 1)
de FUZZY SMM
dans la sortie de Servo
librement se trouvent devenue au récepteur. Servokabel
de FUZZY SMM
pour la sensibilité se







































































