





























2.4 IRT 710 terms
About these terms
Some words have a specific meaning when used in this manual. Definitions of
these words in this manual are listed below.
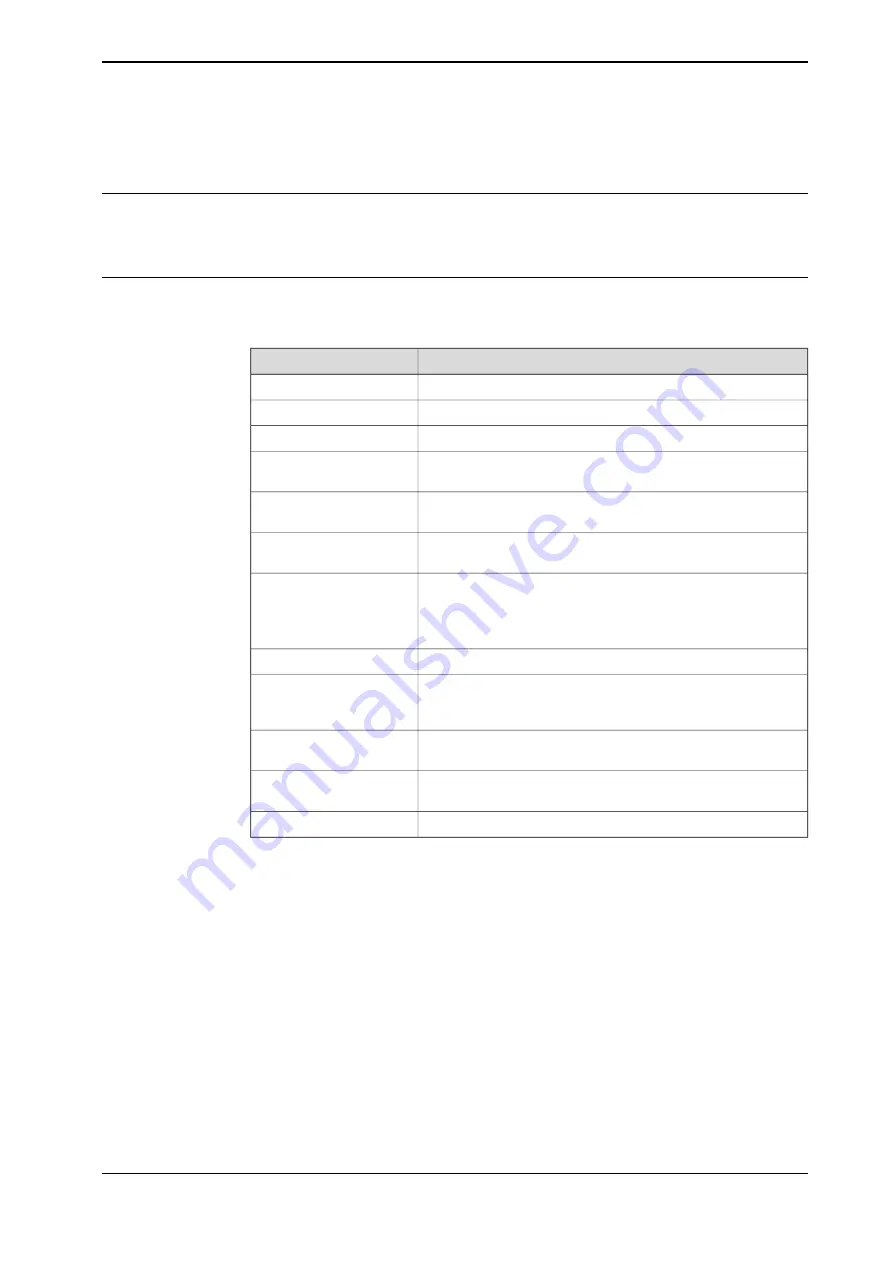
Term list
Words that have italic font style in the definition column are included in the term
list and have their own definitions.
Definition
Term
The robot and the IRT 710 .
Robotic system
The manipulator and the controller.
Robot
The 6 axis mechanical unit of the robot.
Manipulator
The motion system used to control the manipulator & IRT 710
(i.e. ABB IRC5).
Controller
The complete carriage assembly including all moving parts
(cable track, lubrication system, sensors, and so on).
Translation unit
The moving part of the IRT 710. The top plate receives the
tooling / robot.
Carriage
The static part of the IRT 710.
Track
The track is delivered as modules to be assembled by the cus-
tomer, as described in
Assembling the track motion IRT 710 on
.
Maximum stroke of the carriage.
Travel length
The Serial Measurement Board Box, a control box which in-
cludes the SMB card for the IRT 710 axis as well as the resolver
position backup battery.
SMB Box
The Serial Measurement Board is a integrated circuit board
used to measure and store the position of each robot axes.
SMB
Is the lubricated rail (steel beam) on which the cam roller unit
slides.
Rectangular rail
Is the roller which translates on the rectangular rail.
Cam roller unit
Product manual - IRT 710
83
3HKA00000186299-001 Revision: B
© Copyright 2023 ABB. All rights reserved.
2 Technical data
2.4 IRT 710 terms
Summary of Contents for IRT 710
Page 1: ...ROBOTICS Product manual IRT 710 ...
Page 14: ...This page is intentionally left blank ...
Page 58: ...This page is intentionally left blank ...
Page 84: ...This page is intentionally left blank ...
Page 360: ...This page is intentionally left blank ...
Page 364: ...This page is intentionally left blank ...
Page 378: ...This page is intentionally left blank ...
Page 380: ...This page is intentionally left blank ...
Page 383: ......







































































