





























1 Description
1.5.4 Wrist torque
3HAC 025861-001
Rev.E
29
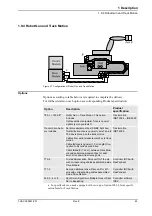
Limited axis 5, center line down
Figure 17 Moment of inertia when axis 5 center line down.
1.5.4 Wrist torque
The table below shows the maximum permissible torque due to payload.
.
Axis Robot Type
Maximum moment of inertia
5
IRB 6620-150/2.2
Ja5 = Load
x
((Z + 0,200)
2
+ L
2
) + max (J
0x
, J
0y
)
≤
215 kgm
2
6
IRB 6620-150/2.2
Ja6 = Load
x
L
2
+ J
0Z
≤
195 kgm
2
Pos
Description
A
Center of gravity.
Description
J
ox
, J
oy
, J
oz
Max. moment of inertia around the X, Y and Z axes at center of gravity.
Note! The values are for reference only, and should not be used for calculating permitted
load offset (position of center of gravity) within the load diagram, since those also are lim-
ited by main axes torques as well as dynamic loads. Also arm loads will influence the per-
mitted load diagram. For finding the absolute limits of the load diagram, please use the ABB
RobotLoad. Please contact your local ABB organization.
Robot type
Max wrist torque
axis 4 and 5
Max wrist
torque axis 6
Max torque
valid at load
IRB 6620 - 150/2.20
736 Nm
383 Nm
150 kg
Summary of Contents for IRB 6620
Page 1: ...Product specification Articulated robot IRB 6620 150 2 2 M2004...
Page 2: ......
Page 3: ...Product specification Articulated robot 3HAC025861 001 Rev E IRB 6620 150 2 2 M2004...
Page 116: ...2 DressPack and SpotPack 2 9 1 Options 114 Rev E 3HAC 025861 001...
Page 132: ...3 Specification of Variants and Options 3 1 14 Documentation 130 Rev E 3HAC 025861 001...
Page 134: ...4 Accessories 132 Rev E 3HAC 025861 001...
Page 137: ......





















































