





























Using an external voltage supply directly on the respective brake
This procedure details how to release the holding brake of a specific axis by
supplying external voltage directly on the brake.
Note
Action
Make the connection to the current motor
according to the Circuit Diagram.
Every axis has a holding brake built into the
axis motor. This holding brake may be re-
leased by connecting 24VDC power supply
directly to one of the connectors in the motor.
DANGER
When power is connected directly to the
brake cable, the brake will be released imme-
diately when the power is switched on.
This may cause some unexpected robot
movements!
1
See chapter
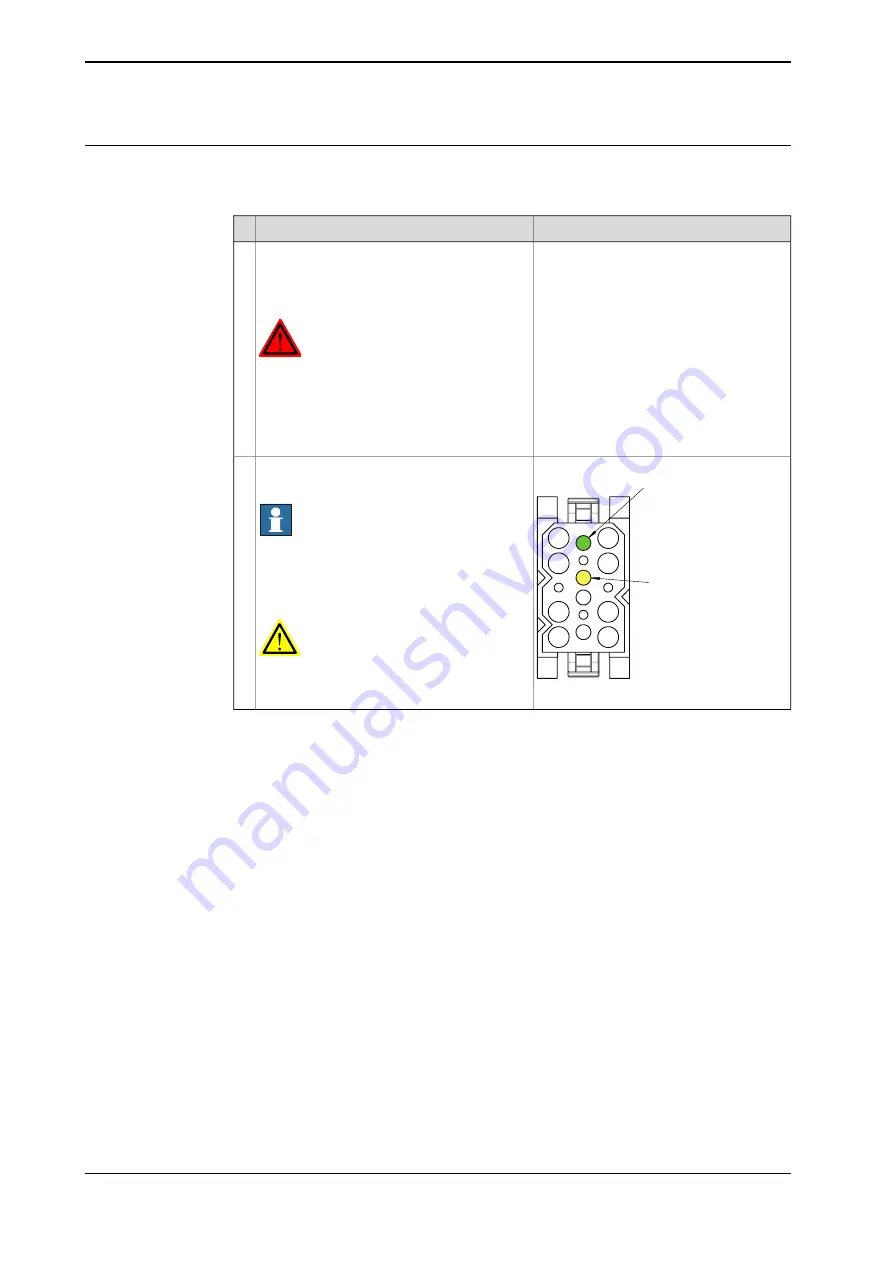
Axes 1, 2 and 3:
Pos 2: +24 V
Pos 5: 0 V
xx1400001984
Connect an external 24 VDC power supply
to the motor, according to the figures.
Note
Be careful not to interchange the 24V and 0V
pins!
If they are mixed up, damage can be caused
to the intergrated quenching circuits.
WARNING
Incorrect connections can cause all brakes
to be released simultaneously!
2
64
Product manual - IRB 4400
3HAC022032-001 Revision: Q
© Copyright 2004-2018 ABB. All rights reserved.
2 Installation and commissioning
2.4.2 Manually releasing the brakes
Continued
Summary of Contents for IRB 4400 - L10
Page 1: ...ROBOTICS Product manual IRB 4400 ...
Page 8: ...This page is intentionally left blank ...
Page 94: ...This page is intentionally left blank ...
Page 282: ...This page is intentionally left blank ...
Page 294: ...This page is intentionally left blank ...
Page 296: ...This page is intentionally left blank ...
Page 302: ......
Page 303: ......



































































