





























5.2.2 Cut the paint or surface on the robot before replacing parts
General
Follow the procedures in this section whenever breaking the paint of the robot
during replacement of parts.
For robots with protection type Clean Room
When replacing parts on the robot, it is important to make sure that after the
replacement, no particles will be emitted from the joint between the structure and
the new part, and that the easy cleaned surface is retained.
Required equipment
Note
Spare parts
Equipment
Sikaflex 521 FC. Color white.
3HAC026759-001
Sealing compound
Width 6-9 mm, made of wood.
Tooling pin
Ethanol
Cleaning agent
Knife
Lint free cloth
White
3HAC036639-001
Touch up paint Clean Room/Hy-
gienic
Graphite White
3HAC067974-001
Touch up paint Standard/Foundry
Plus
Removing
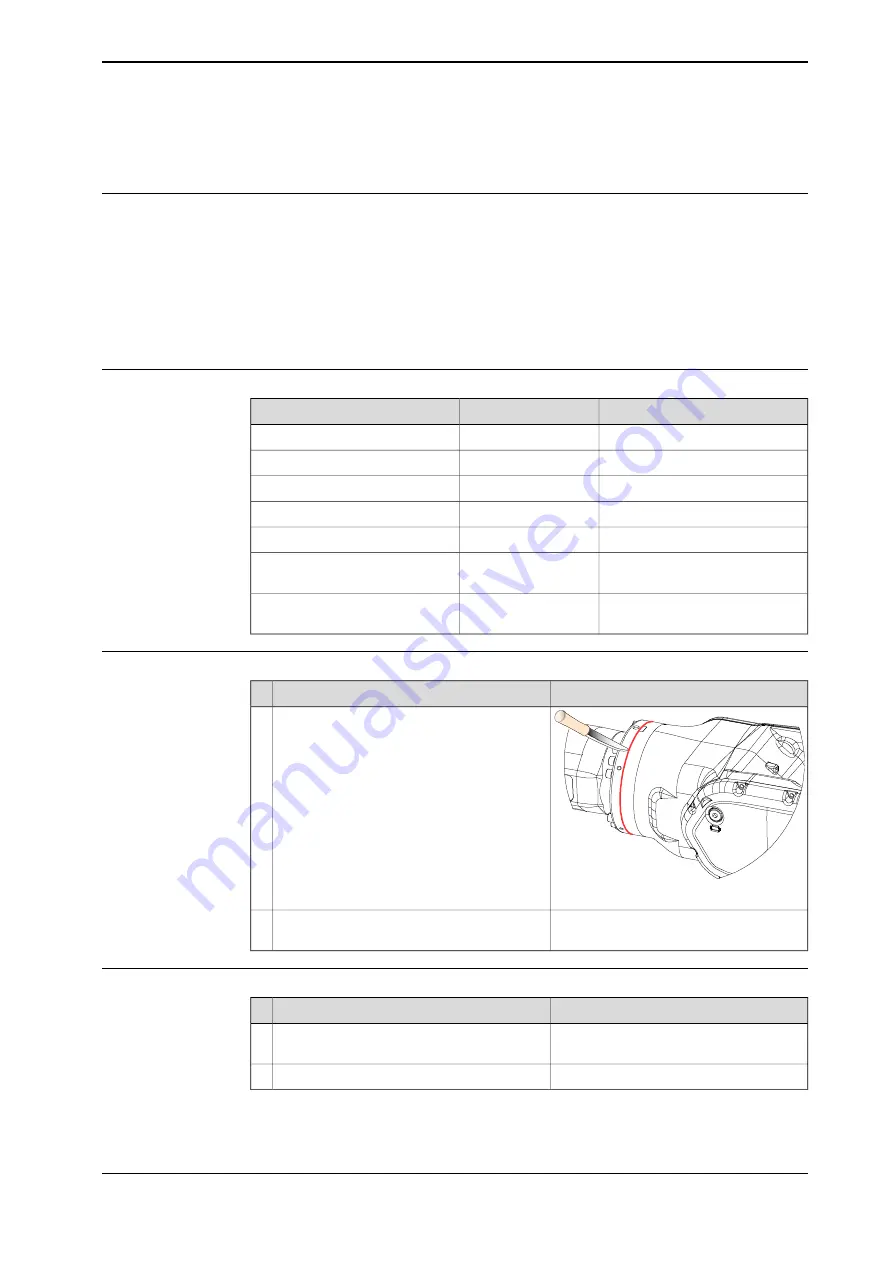
Description
Action
xx0900000121
Cut the paint with a knife in the joint between
the part that will be removed and the struc-
ture, to avoid that the paint cracks.
1
Carefully grind the paint edge that is left on
the structure to a smooth surface.
2
Refitting
Description
Action
Use ethanol on a lint free cloth.
Before the parts are refitted, clean the joint
so that it is free from oil and grease.
1
Place the tooling pin in hot water.
2
Continues on next page
Product manual - IRB 1300
145
3HAC070390-001 Revision: G
© Copyright 2020-2022 ABB. All rights reserved.
5 Repair
5.2.2 Cut the paint or surface on the robot before replacing parts
Summary of Contents for IRB 1300
Page 1: ...ROBOTICS Product manual IRB 1300 ...
Page 8: ...This page is intentionally left blank ...
Page 36: ...This page is intentionally left blank ...
Page 100: ...This page is intentionally left blank ...
Page 746: ...This page is intentionally left blank ...
Page 762: ...This page is intentionally left blank ...
Page 764: ...This page is intentionally left blank ...
Page 768: ......
Page 769: ......





































































