
















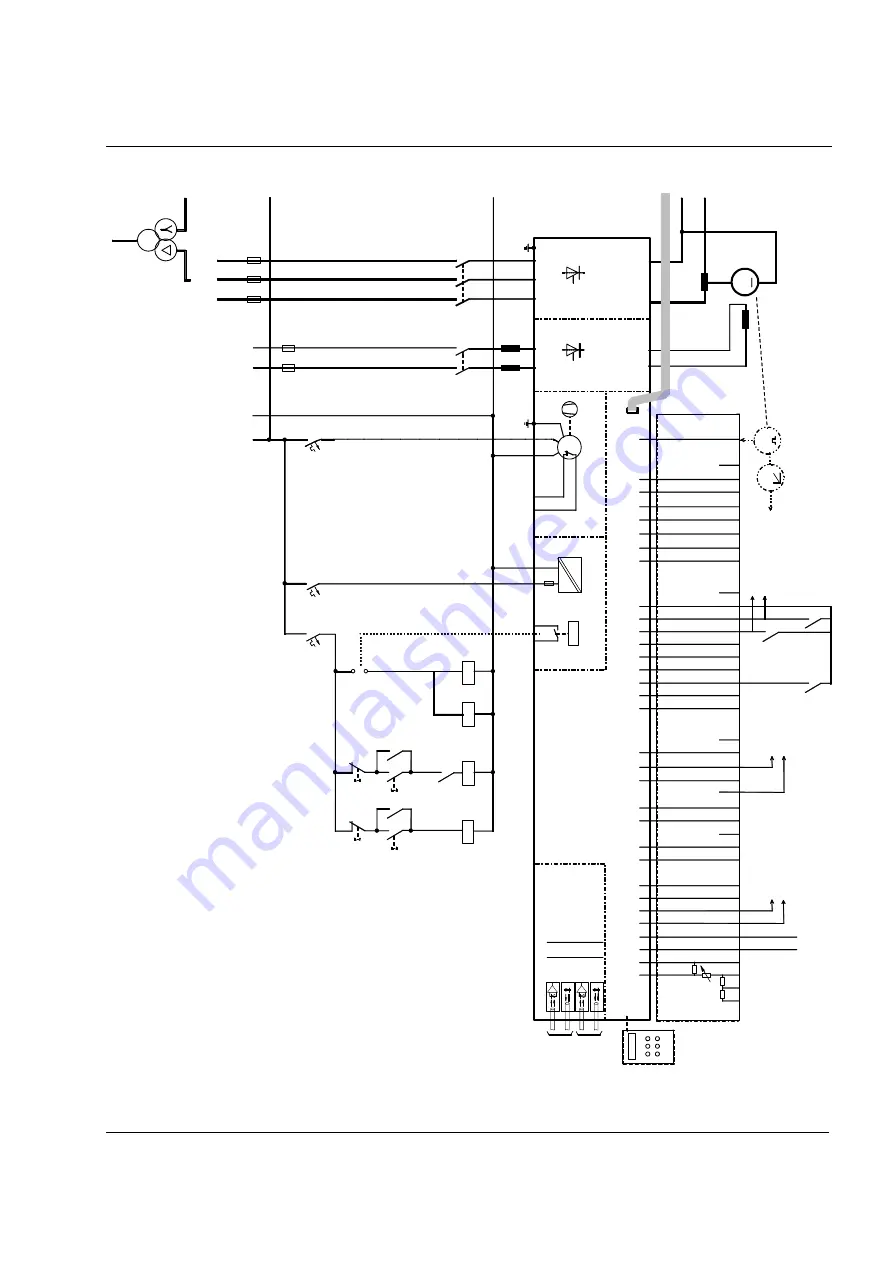
Appendix
DCS 500 12-Pulse Planning and Start-Up
A1 -1
Connection example
A
IT
A
C
A
I1
A
I2
A
I3
A
I4
+
1
0
V-
1
0
V
A
O
1A
O
2
IA
C
T
IN
3
O
U
T
3
IN
1
O
U
T
1
V
5
V
6
V
1
V
2
X
3
3
P
A
N
E
L
C
D
P
3
1
0
I/
O
b
o
a
rd
(I
O
B
-1
)
C
o
m
m
u
n
ic
a
ti
o
n
b
o
a
rd
(
C
O
M
-x
)
D
I1
D
I2
D
I3
D
I4
D
I5
D
I6
D
I7
D
I8
+
4
8
V
D
O
1D
O
2D
O
3D
O
4D
O
5D
O
6D
O
7
X
9
6
:
D
O
8
P
o
w
e
r
s
u
p
p
ly
(P
O
W
-1
)
1
2
X
9
9
:
1
2
F
1
3
.1
5
A
X
2
:
4
5
X
2
:
1
2
3
X
3
:1
2
3
4
5
6
7
8
9
1
0
X
4
:
1
2
3
4
5
6
7
8
9
1
0
X
6
:1
2
3
4
5
6
7
8
9
1
0
X
6
:
1
2
3
4
5
6
7
8
1
..
.1
0
M
5
5
0
V
0
V
0
V
0
V
0
V
_
_
_
_
_
+
+
+
+
+
K
1
K
2
0
K
2
1
K
1
O
N
O
F
F
S
T
O
P
K
2
1
K
2
0
K
2
1
K
2
0
K
3
K
1
9
6
:1
9
6
:2
S
T
A
R
T
F
6
1
2
F
4
1
2
F
5
1
2
2
3
0
V
L
1
M
P
F
ie
ld
e
x
c
it
e
r
u
n
it
(
F
E
X
-1
/2
)
L
1
L
2
X
1
:
1
7
F
3
K
3
1
3
2
4
L
3
M ~
U
1
W
1
V
1
P
E
L
1
L
2
L
3
≤
1
0
0
0
V
F
1
K
1
1
3
5
2
4
6
C
o
n
v
e
rt
e
r
m
o
d
u
le
X
5
:
5
0
/6
0
H
z
C
o
n
tr
o
l
b
o
a
rd
(
C
O
N
-1
)
M
A
S
T
E
R
X
1
8
:
n
-s
o
ll
X
4
:8
X
4
:6
X
3
:8
X
3
:7
X
6
:7
X
6
:8
≤
5
0
0
V
X
1
:
5
3
C
1
D
1
M
T
T
X
3
:1
..
.3
S
la
v
e
S
la
v
e
S
la
v
e







































































