





























ACS550 User’s Manual
99
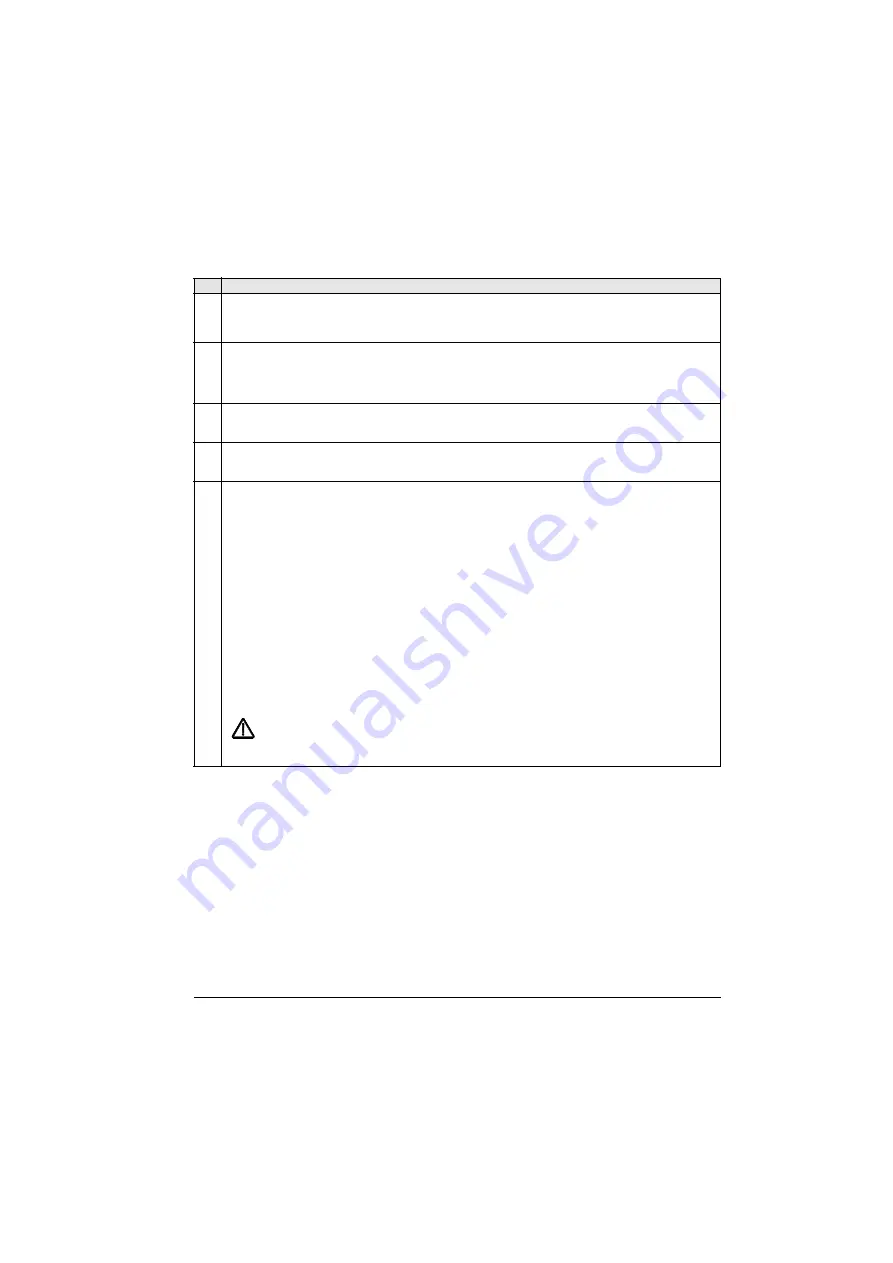
9906
MOTOR NOM CURR
Defines the nominal motor current.
• Must equal the value on the motor rating plate.
• Range allowed: 0.2…2.0 ·
I
2hd
(where
I
2hd
is drive current).
9907
MOTOR NOM FREQ
Defines the nominal motor frequency.
• Range: 10…500 Hz (typically 50 or 60 Hz)
• Sets the frequency at which output voltage equals the
MOTOR
NOM
VOLT
.
• Field weakening point = Nom Freq · Supply Volt / Mot Nom Volt
9908
MOTOR NOM SPEED
Defines the nominal motor speed.
• Must equal the value on the motor rating plate.
9909
MOTOR NOM POWER
Defines the nominal motor power.
• Must equal the value on the motor rating plate.
9910
ID RUN
This parameter controls a self-calibration process called the Motor ID Run. During this process, the drive operates
the motor (motor rotating) and makes measurements in order to identify motor characteristics and create a model
used for internal calculations. An ID Run is especially effective when:
• vector control mode is used [parameter
= 1 (
VECTOR
:
SPEED
) or 2 (
VECTOR
:
TORQ
)], and/or
• operation point is near zero speed, and/or
• operation requires a torque range above the motor nominal torque, over a wide speed range, and without any
measured speed feedback (i.e. without a pulse encoder).
0 =
OFF
/
IDMAGN
– The Motor ID Run process is not run. Identification magnetization is performed, depending on
parameter 9904 and 2101 settings. In identification magnetization, the motor model is calculated at first start by
magnetizing the motor for 10 to 15 s at zero speed (motor not rotating). The model is recalculated always at start
after motor parameter changes.
• Parameter
= 1 (
VECTOR
:
SPEED
) or 2 (
VECTOR
:
TORQ
): Identification magnetization is performed.
• Parameter
= 3 (
SCALAR
:
FREQ
) and parameter
= 3 (
SCALAR
FLYST
) or 5 (
FLY
+
BOOST
): Identification
magnetization is performed.
• Parameter
= 3 (
SCALAR
:
FREQ
) and parameter
SCALAR
FLYST
) or 5 (
FLY
+
BOOST
): Identification magnetization is not performed.
1 =
ON
– Enables the Motor ID Run, during which the motor is rotating, at the next start command. After run
completion, this value automatically changes to 0.
Note:
The motor must be de-coupled from the driven equipment.
Note:
If motor parameters are changed after ID Run, repeat the ID Run.
WARNING!
The motor will run at up to approximately 50…80% of the nominal speed during the ID Run. The
motor will rotate in the forward direction.
Ensure that it is safe to run the motor before performing the ID Run!
See also section
on page
.
Code Description
Summary of Contents for ACS550 Series
Page 1: ...ACS550 User s Manual ACS550 01 Drives 0 75 132 kW ACS550 U1 Drives 1 200 hp ...
Page 4: ......
Page 10: ...10 ACS550 User s Manual Table of contents ...
Page 84: ...84 ACS550 User s Manual Application macros ...
Page 188: ...188 ACS550 User s Manual Parameters ...
Page 242: ...242 ACS550 User s Manual Fieldbus adapter ...
Page 276: ...276 ACS550 User s Manual Technical data WARNING Do not use RFI EMC filters on IT systems ...







































































