







Your copter has powerful motors and high-speed propellers. Never place your hands near propellers
while the motors are armed or the safety button displays solid red. Always press and hold the safety
button until it displays blinking red before handling.
Always fly in an open area away from people and buildings; do not attempt to fly indoors or in a confined
space. Do not fly over people, near airports, or in any situation that could pose a hazard to those around
you. Always fly within your line of sight and in compliance with local regulations. Your copter will not
avoid obstacles on its own. As the operator, it is your job to recognize and avoid obstructions while
flying. Always follow the preflight and postflight steps in the order described in this manual and the
flight checklist, and remain attentive at all times while flying.
Environmental factors, such as wind and GPS irregularities, can cause instability in flight. Your copter will
attempt to compensate for these factors by automatically landing if it detects an unsafe flying condition
due to loss of RC signal, loss of GPS signal, or low battery. To avoid potential hazards due to
environmental factors, identify the boundaries of your flying area before takeoff, and recover the copter
manually by switching into stabilize mode if it moves outside your designated flying area. If you observe
any inconsistent behavior, land, and consult the troubleshooting guide at
3dr.com/learn
.
Always use an RC transmitter as a primary or backup control system when flying. Ensure that the
transmitter is turned on any time the copter is powered. If contact with the transmitter is lost during
flight, the copter will land and display a blinking yellow light. If the copter is more than 2 meters (6.5
feet) from the launch point, it will return to launch (RTL) before landing.
Autopilot-positioned flight modes (loiter, autonomous, and return to launch) require an active GPS
signal. If GPS signal is lost during flight, the copter will land and display a blinking blue and yellow light
with a high-high-high-low tone. Always choose an unobstructed flying area to improve signal strength.
When the battery reaches 25% of its remaining charge, the copter will land and display a blinking yellow
light with a quick repeating tone. If the copter reaches the low battery limit during a mission, it will return
to the launch point before landing.
!
Flight safety
Stabalize
Altitude Hold
Loiter
Full Autonomy
Return to Launch
Stabalize
Altitude Hold
Loiter
Full Autonomy
Return to Launch
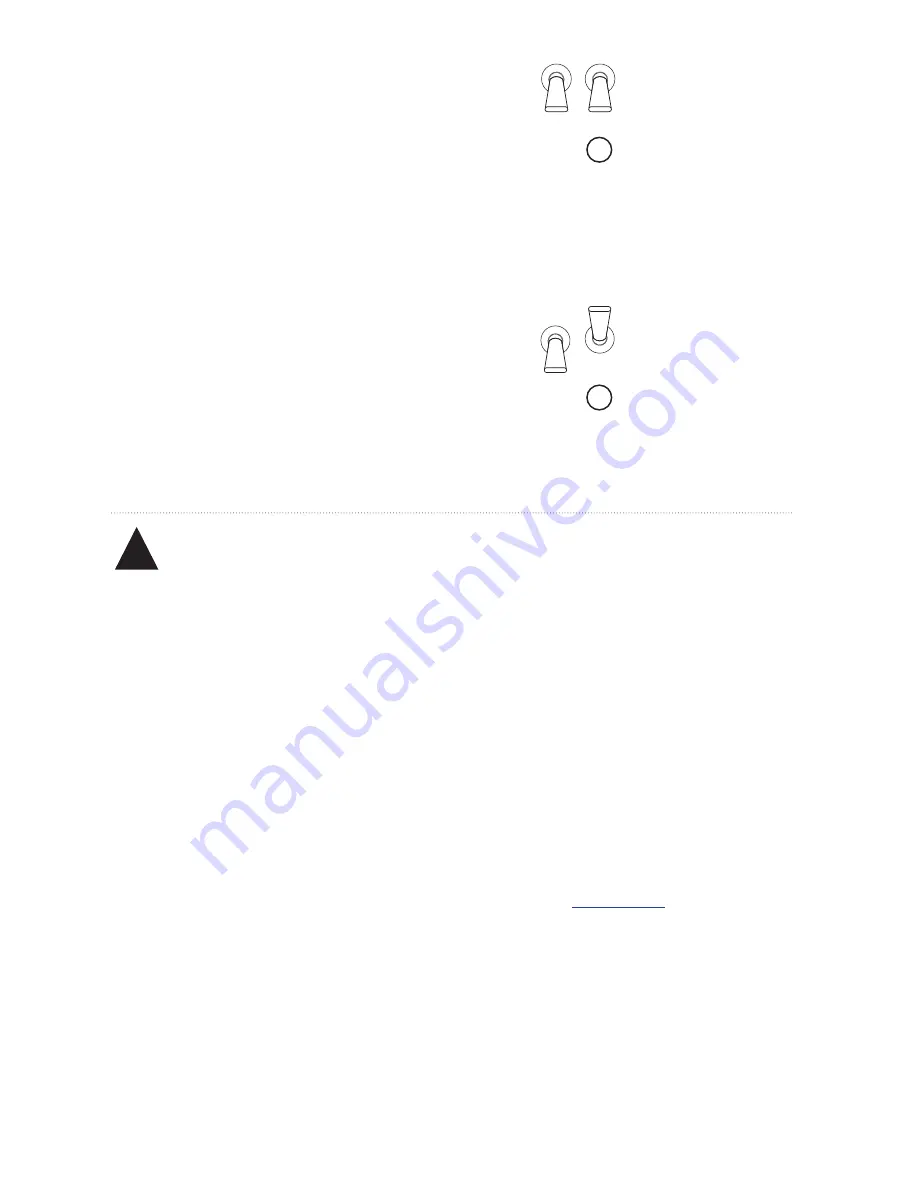
Autonomous mode
Fly a fully autonomous mission using a
computer or Android device as a ground
station. When switched into autonomous
mode, the copter will automatically perform
the mission and report data back to the
ground station.
Return to launch
Return to launch (RTL) commands the
copter to achieve a minimum altitude of 15
meters, return to the launch point, hover for
five seconds, and land. Use RTL to end your
flight automatically.
position of switch:
back/back
GPS lock required
before takeoff
GPS
position of switch:
forward/back
GPS lock required
before takeoff
GPS
position of switch:
forward/forward
forward/back
no GPS lock required
position of switch:
center/back
no GPS lock required





































































